44_大模型_LLMs_分布式训练面
文章目录
大模型(LLMs)分布式训练面
来自: AiGC面试宝典
扫码 查看更
1. 理论篇
1.1 训练 大语言模型 存在问题?
• 显存效率:模型参数量太大,显存不够用
即使目前显存最大的GPU也放不下这些大模型的模型参数。例如:175B参数量的GPT3模型参数需要占用700GB( $175\mathsf{B}^{\ast}4\mathsf{k}$ ytes) 的显存。参数梯度是700GB,Adam优化器状态需要1400GB,共计需要2.8TB的显存。
• 计算效率:训练数据量多,模型参数量大,计算量大,单机训练时间久
即使我们能将大模型放在一张GPU上,训练大模型需要的海量计算操作需要耗费很长时间。例如:用英伟达A100显卡训练175B参数量的GPT3模型大约需要288年。
1.2 什么是 点对点通信?
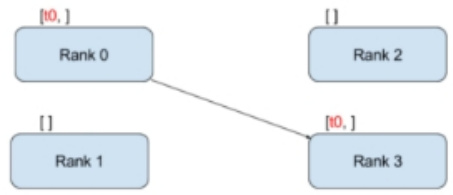
• 点对点通信 思路:一个进程发送数据,一个进程接收数据• 优点:速度快,成本低
1.3 什么是 集体通信?
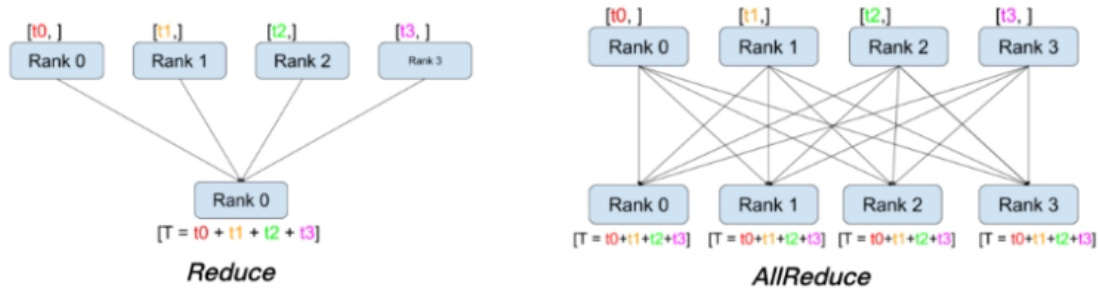
• 集体通信思路:多个进程发送数据,多个进程接收数据。• 缺点:速度慢,成本高
1.4 什么是 数据并行?
• 介绍:将整个数据集切分为多份,每张GPU分配到不同的数据进行训练,每个进程都有一个完整的模型副本。

本地训练神经网络的送代过程
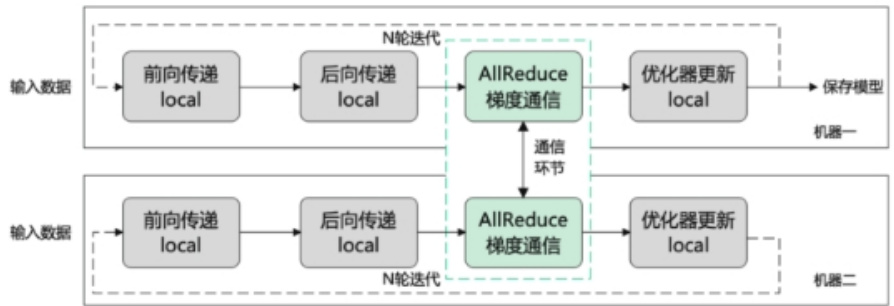
数据并行的迭代过程
• 关键:保证多个GPU上的模型副本是相同的
- 确保所有worker都从相同的初始化模型参数开始训练。在训练开始前,通常会将0号卡的1模型参数通信同步到其他卡。
- 每次训练选代中,在后向传递之后,优化器更新参数之前,插入reduce通信操作来规约梯度,确保所有worker上的梯度都是相同的。
通过以上两点,在优化器更新后,也可以保证所有worker上的模型参数是相同的。
相同的初始化模型参数 $\mathbf{+}$ 相同的梯度 $\rightharpoonup$ 相同的模型参数。
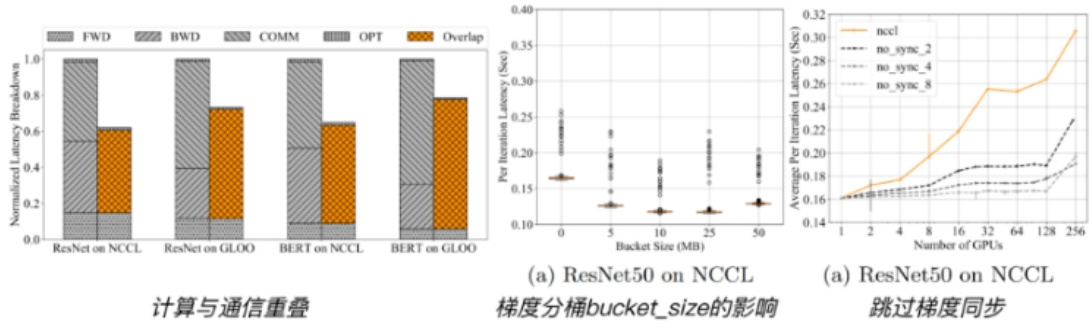
1.5 数据并行 如何 提升效率?
- 梯度分桶:动机是集体通信在大张量上比在小张量上效率更高。
- 2.计算与通信重叠:有了梯度分桶之后,在等待同一个桶内的梯度计算完后,就可以进行通信操作
- 3.跳过梯度同步: 梯度累加,减少梯度通信的频次。
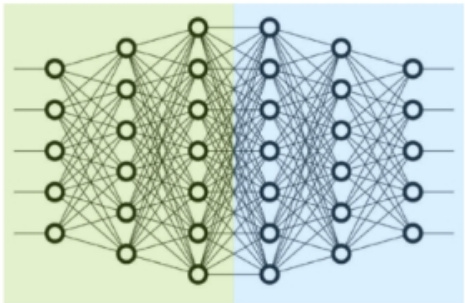
1.6 什么是 流水线并行?
- 层间划分,将不同的层划分到不同的GPU上
- 前3层在0号卡上,后3层在1号卡上
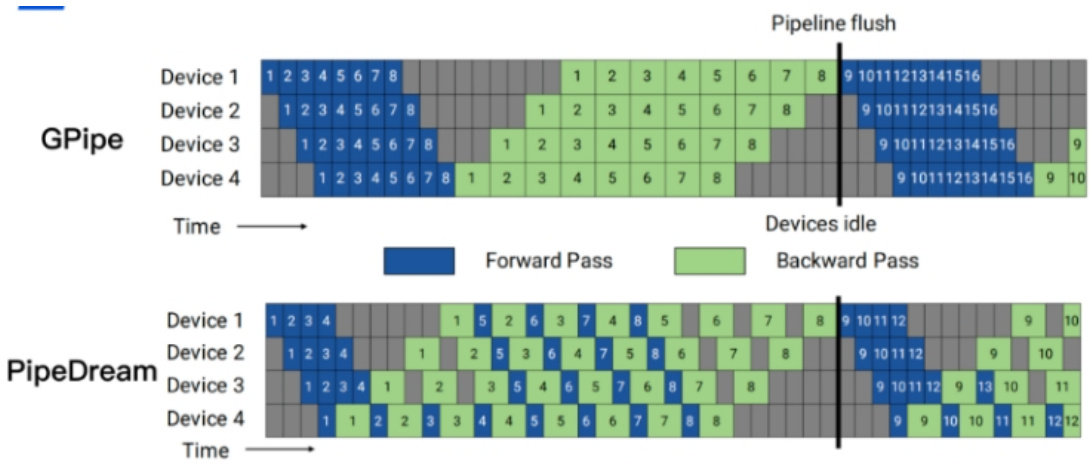
显存效率:PipeDream $>$ GPipe
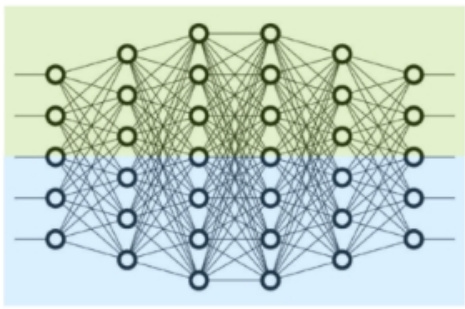
1.7 什么是 张量并行 (intra-layer)?
• 层内划分,切分一个独立的层划分到不同的GPU上• 0号卡和1号卡分别计算某个层的不同部分
对于一个简单的矩阵乘法GEMMs $\mathsf{Y}=\mathsf{X}\mathsf{A}$
按照对权重矩阵A的分块方式,张量并行分为行并行和列并行.

1.8 数据并行 vs 张量并行 vs 流水线并行?
• 数据并行:计算效率高、实现简单。
• 显存效率:每张卡上都保存了完整的模型、梯度、优化器状态,因此显存效率不高• 计算效率:当增加并行度时,单卡的计算量是保持恒定的,可以实现近乎完美的线性扩展。但规约梯度的通信开销,与模型大小成正相关。
• 张量并行:因模型结构而异,实现难度大。
• 显存效率:随着并行度增加,成比例地减少显存占用。是减少单层神经网络中间激活的唯一方法• 计算效率:频繁的通信,限制了两个通信阶段之间的计算量,影响了计算效率,计算效率很低。
• 流水线并行:通信成本最低
• 显存效率:减少的显存与流水线并行度成正比。但流水线并行不会减少每层中间激活的显存占用• 计算效率:成本更低的点对点(P2P)通信。通信量与流水线各个阶段边界的激活值大小成正比。显存效率:模型并行>流水线并行>数据并行通信效率:流水线并行>数据并行>模型并行
1.9 什么是 3D并行?
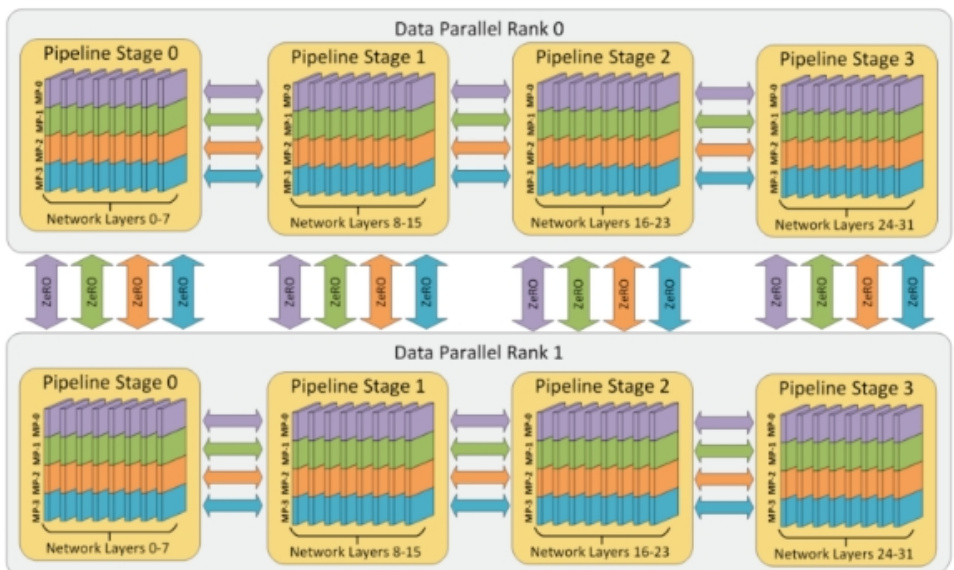
3D并行。4路张量并行,4路流水线并行,2路数据并行。共32个workers。
1.10 想要训练1个LLM,如果只想用1张显卡,那么对显卡的要求是什么?
显卡显存足够大,nB模型微调一般最好准备20nGB以上的显存。
1.11 如果有N张显存足够大的显卡,怎么加速训练?
数据并行(DP),充分利用多张显卡的算力。
1.12 如果显卡的显存不够装下一个完整的模型呢?
最直观想法,需要分层加载,把不同的层加载到不同的GPU上(accelerate的device_map)也就是常见的PP,流水线并行。
1.13 PP推理时,是一个串行的过程,1个GPU计算,其他空闲,有没有其他方式?
• 横向切分:流水线并行(PP),也就是分层加载到不同的显卡上。• 纵向切分:张量并行(TP),在 DeepSpeed 世界里叫模型并行(MP)
1.14 3种并行方式可以叠加吗?
是可以的, ${\mathsf{D P}}{+}{\mathsf{T P}}{+}{\mathsf{P P}}$ ,这就是3D并行。如果真有1个超大模型需要预训练,3D并行那是必不可少的。毕竟显卡进化的比较慢,最大显存的也就是 $1100809\cdot$ 。单卡80g,可以完整加载小于40B的模型,但是训练时 $^+$ 梯度 $^+$ 优化器状态,5B模型就是上限了,更别说activation的参数也要占显存,batch size还得大。而现在100亿以下(10B以下)的LLM只能叫small LLM。
1.15 Colossal-AI 有1D/2D/2.5D/3D,是什么情况?
Colossal-AI 的nD是针对张量并行,指的是TP的切分,对于矩阵各种切,和3D并行不是一回事。
1.16 除了3D并行有没有其他方式大规模训练?
可以使用更优化的数据并行算法FSDP(类似ZeRO3)或者直接使用 DeepSpeed ZeRO 。
1.17 有了ZeRO系列,为什么还需要3D并行?
根据ZeRO论文,尽管张量并行的显存更省一点,张量并行的通信量实在太高,只能限于节点内(有NVLINK)。如果节点间张量并行,显卡的利用率会低到 $15%$ 但是,根据Megatron-LM2的论文,当显卡数量增加到千量级,ZeRO3是明显不如3D并行的。
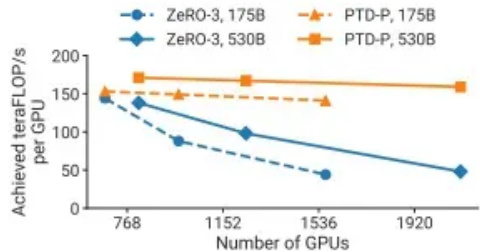
Figure 10:Throughput per GPU ofPTD-Pand ZeRO-3for two different GPT models (the 175B GPT-3modelis shown with dotted lines, and the 530Bmodelis shownwith solid lines).Gloha!batch sizes are fixedandZeRO-3isusedwithoutanymodel paralleis
1.18 平民适不适合玩3D并行?
不适合。
3D并行的基础是,节点内显卡间NVLINK超高速连接才能上TP。有没有NVLINK都是个问题。
而且,节点间特殊的网络通常有400Gb/s?远超普通IDC内的万兆网络10Gb/s。
1.19 平民适不适合直接上多机多卡的ZeRO3(万兆网)?
不适合。
想象一下,当65B模型用Zero3,每一个step的每一张卡上需要的通信量是195GB(3倍参数量),也就是1560Gb。万兆网下每步也要156s的通信时间,这画面太美。
1.20 分布式并行及显存优化技术并行技术有哪一些,都有什么特点?
分布式并行及显存优化技术并行技术:
• 数据并行(如:PyTorch DDP)
• 模型/张量并行(如:Megatron-LM(1D)、Colossal-AI(2D、2.5D、3D))
• 流水线并行(如:GPipe、PipeDream、PipeDream-2BW、PipeDream Flush(1F1B))
• 多维混合并行(如:3D并行(数据并行、模型并行、流水线并行))
• 自动并行(如:Alpa(自动算子内/算子间并行))
• 优化器相关的并行(如:ZeRO(零冗余优化器,在执行的逻辑上是数据并行,但可以达到模型并行的显存优化效果)、PyTorch FSDP)
1.21 显存优化技术有哪一些,都有什么特点?
显存优化技术:
• 重计算(Recomputation):Activation checkpointing(Gradient checkpointing),本质上是一种用时间换空间的策略。
• 卸载(Offload)技术:一种用通信换显存的方法,简单来说就是让模型参数、激活值等在CPU内存和GPU显存之间左右横跳。如:ZeRO-Offload、ZeRO-Infinity等。
• 混合精度(BF16/FP16):降低训练显存的消耗,还能将训练速度提升2-4倍。• BF16 计算时可避免计算溢出,出现Inf case。• FP16 在输入数据超过65506 时,计算结果溢出,出现Inf case。
1.22 常见的分布式训练框架哪一些,都有什么特点?
• 第一类:深度学习框架自带的分布式训练功能。如:TensorFlow、PyTorch、MindSpore、Oneflow、PaddlePaddle等。
• 第二类:基于现有的深度学习框架(如:PyTorch、Flax)进行扩展和优化,从而进行分布式训练。如:Megatron-LM(张量并行)、DeepSpeed(Zero-DP)、Colossal-AI(高维模型并行,如2D、2.5D、3D)、Alpa(自动并行)等
2. 实践篇
2.1 假如有超多的8卡A100节点(DGX A100),如何应用3D并行策略?
• 首先,张量并行。3种并行方式里,张量并行(TP)对于GPU之间的通信要求最高,而节点内有NVLINK通信速度可以达到600GB/s。
• 其次,流水线并行,每个节点负责一部分层,每35个节点组成一路完整的流水线,也就是一个完整的模型副本,这里一个模型副本需280卡。
• 最后,数据并行,官方也做了8路,10路,12路的并行实验,分别使用280个节点,350个节点和420个节点。
参考 Megatron-Turing NLG 530B集群规模越大,单个GPU利用率越低。
2.2 如果想构这样一个大规模并行训练系统,训练框架如何选?
可以参考Megatron-Turing NLG 530B,NVIDIA Megatron-LM $^+$ Microsoft DeepSpeedBLOOM 则是PP+DP用DeepSpeed,TP用Megatron-LM
当然还有一些其他的训练框架,在超大规模下或许也能work。
2.3 训练框架如何选?
下面这个图是bloom的一个实验,DP/TP/PP都能降显存,核心是要降到单卡峰值80g以下。
真大模型就是要TP $_{\overline{{\mathbf{\alpha}}}=8}$ ,充分利用NVLINK,然后优先PP,最后DP。
| GPUs | Size | DP | TP | PP | MBS | Mem | TFLOPS | Notes |
| 8 | 20B | 1 | 8 | 1 | 1 | 68GB | 107.48 | 02-17 |
| 80 | 200B | 1 | 8 | 10 | 1 | 75GB | 97.82 | 02-17 |
| 160 | 200B | 2 | 8 | 10 | 1 | 53GB | 96.19 | 02-17 |
| 知乎-@suel6 |
然而假大模型(7B)比如LLaMA-7B,可以不用3D并行,直接用DeepSpeed ZeRO更方便,参考open-llama项目。
3. 并行化策略选择篇
3.1 如何选择一款分布式训练框架?
• 训练成本:不同的训练工具,训练同样的大模型,成本是不一样的。对于大模型,训练一次动辄上百万/千万美元的费用。合适的成本始终是正确的选择。
• 训练类型:是否支持数据并行、张量并行、流水线并行、多维混合并行、自动并行等
• 效率:将普通模型训练代码变为分布式训练所需编写代码的行数,我们希望越少越好。
• 灵活性:你选择的框架是否可以跨不同平台使用?
3.2 如何选择一款分布式训练框架?
• TPU $^+$ XLA $^+$ TensorFlow/JAX :由Google主导,由于TPU和自家云平台GCP深度绑定。• GPU $^+$ PyTorch $^+$ Megatron-LM $^+$ DeepSpeed :由NVIDIA、Meta、MicroSoft大厂加持,社区氛围活跃,也更受到大家欢迎。
3.3 单GPU
• 显存够用: 直接用• 显存不够:上offload,用cpu
3.4 单节点多卡
• 显存够用(模型能装进单卡):DDP或ZeRO• 显存不够:TP或者ZeRO或者PP
重点:没有NVLINK或者NVSwitch,也就是穷人模式,要用P
3.5 多节点多卡
如果节点间通信速度快(穷人的万兆网肯定不算)
ZeRO或者3D并行,其中3D并行通信量少但是对模型改动大。
如果节点间通信慢,但显存又少。DP+PP+TP+ZeRO-1
4. 问题篇
4.1 推理速度验证
ChatGML在V100单卡的推理耗时大约高出A800单卡推理的 $40%$ 。
ChatGML推理耗时和问题输出答案的字数关系比较大,答案字数500字以内,A800上大概是每100字,耗时1秒,V100上大概是每100字,耗时1.4秒。
- ChatGML在A800单卡推理耗时统计
| 问题 | 运行次 数 | 平均答案 长度 | 平均耗时 |
| 给我介绍一下苹果公 司,50个字 | 5 | 146.6 | 1.94589900970 45898 |
| 给我介绍一下微软公 司,50个字 | 5 | 104.6 | 1.29782838821 41113 |
| 给我介绍一下苹果公 司,100个字 | 5 | 165.4 | 2.09909729957 58055 |
| 给我介绍一下微软公 司,100个字 | 5 | 154.4 | 1.90921025276 18409 |
| 给我介绍一下苹果公 司,200个字 | 5 | 168.4 | 2.13020663261 41356 |
| 给我介绍一下微软公 司,200个字 | 5 | 208.8 | 2.60898609161 37697 |
| 给我介绍一下苹果公 司,300个字 | 5 | 443.4 | 5.40341305732 72705 |
| 给我介绍一下微软公 司,300个字 | 5 | 484.2 | 5.980589342 |
| 给我介绍一下苹果公 司,500个字 | 5 | 525.4 | 6.24632849693 2984 |
| 给我介绍一下微软公 司,500个字 | 5 | 591.6 | 6.96139039993 2862 |
- ChatGML在V100单卡推理耗时统计
| 问题 | 运行次 数 | 平均答案 长度 | 平均耗时 |
| 给我介绍一下苹果公 司,50个字 | 5 | 138.4 | 2.76165933609 0088 |
| 给我介绍一下微软公 司,50个字 | 5 | 78.8 | 1.57395930290 22216 |
| 给我介绍一下苹果公 司,100个字 | 5 | 144.6 | 2.87229075431 8237 |
| 给我介绍一下微软公 司,100个字 | 5 | 180.8 | 3.49202961921 6919 |
| 给我介绍一下苹果公 司,200个字 | 5 | 168.8 | 3.46867556571 96047 |
| 给我介绍一下微软公 司,200个字 | 5 | 268.6 | 5.26768960952 7588 |
| 给我介绍一下苹果公 司,300个字 | 5 | 460.2 | 9.26667351722 7172 |
| 给我介绍一下微软公 司,300个字 | 5 | 472.2 | 9.08066983222 9614 |
| 给我介绍一下苹果公 司,500个字 | 5 | 558 | 11.0442333221 43555 |
| 给我介绍一下微软公 司,500个字 | 5 | 585.4 | 11.4136377811 43189 |
• 结论:
• 训练效率方面: 多机多卡训练,增加训练机器可以线性缩短训练时间。
• 推理性能方面:
• ChatGML在V100单卡的推理耗时大约高出A800单卡推理的 $40%$ 。
$\bullet$ ChatGML推理耗时和问题输出答案的字数关系比较大,答案字数500字以内,A800上大概是每100字,耗时1秒,V100上大概是每100字,耗时1.4秒。
4.2 并行化训练加速
可采用deepspeed进行训练加速,目前行业开源的大模型很多都是采用的基于deepspeed框架加速来进行模型训练的。如何进行deepspeed训练,可以参考基于deepspeed构建大模型分布式训练平台。
deepspeed在深度学习模型软件体系架构中所处的位置:
DL model—>train opitimization(deepspeed)—>train framework —> train instruction (cloud)— $_{->}$ GPU device当然需要对比验证deepspeed 的不同参数,选择合适的参数。分别对比stage 2,3进行验证,在GPU显存够的情况下,最终使用stage 2。
4.3 deepspeed 训练过程,报找不主机
解决方法:deepspeed的关联的多机的配置文件,Hostfile 配置中使用ip,不使用hostname
4.4 为什么 多机训练效率不如单机?
多机训练可以跑起来,但是在多机上模型训练的速度比单机上还慢。
通过查看服务器相关监控,发现是网络带宽打满,上不去了,其他系统监控基本正常。原理初始的多机之间的网络带宽是64Gps,后面把多机之间的网络带宽调整为800Gps,问题解决。
实验验证,多机训练的效率,和使用的机器数成线性关系,每台机器的配置一样,如一台GPU机器跑一个epoch需要2小时,4台GPU机器跑一个epoch需要半小时。除了训练速度符合需求,多机训练模型的loss下降趋势和单机模型训练的趋势基本一致,也符合预期。
4.5 多机训练不通,DeepSPeed配置问题
多机间NCCL 不能打通• 解决方法:
新建 .deepspeed_env 文件,写入如下内容
NCCL_IB_DISABLE=1 NCCL_DEBU $\mathrm{\ddot{\rho}}=$ INFO NCCL_SOCKET_IFNAME=eth0 NCCL_P2P_DISABLE $=1$
总结
如果没有NVLINK和节点间还是万兆网的穷人,TP别想了,DP也勉强(显存不够),主要靠PP,再试试ZeRO1参考链接:Model Parallelism: https://huggingface.co/docs/transformers/v4.17.0/en/parallelism
文章作者 大模型
上次更新 2025-03-09