46_图解分布式训练_二_nn_DataParallel篇
文章目录
图解分布式训练(二) nn.DataParallel篇
来自: AiGC面试宝典
扫码 查看更
为什么需要nn.DataParallel?
多GPU并行训练的原理就是将模型参数和数据分布到多个GPU上,同时利用多个GPU计算加速训练过程。具体实现需要考虑以下两个问题:
数据如何划分?因为模型需要处理的数据通常很大,将所有数据放入单个GPU内存中可能会导致内存不足,因此我们需要将数据划分到多个GPU上。一般有两种划分方式:
• 数据并行:将数据分割成多个小批次,每个GPU处理其中的一个小批次,然后将梯度汇总后更新模型参数。• 模型并行:将模型分解成多个部分,每个GPU处理其中一个部分,并将处理结果传递给其他GPU以获得最终结果。
计算如何协同?因为每个GPU都需要计算模型参数的梯度并将其发送给其他GPU,因此需要使用同步机制来保证计算正确性。一般有两种同步方式:
• 数据同步:在每个GPU上计算模型参数的梯度,然后将梯度发送到其他GPU上进行汇总,最终更新模型参数。
• 模型同步:在每个GPU上计算模型参数的梯度,然后将模型参数广播到其他GPU上进行汇总,最终更新模型参数。
一、pytorch中的GPU操作默认是什么样?
pytorch中的GPU操作默认是异步的,当调用函数需要使用 GPU 时,该函数操作 就会 进入 特定设备队列中等待执行,正因为此, pytorch 支持 并行计算。不过 pytorch并行计算 的效果对调用者是不可见。Pytorch中的多GPU并行计算是数据级并行,相当于开了多个进程,每个进程自己独立运行,然后再整合在一起。
device_ids $=$ [0, 1] net $=$ torch.nn.DataParallel(net, device_ids $=$ device_ids)
二、介绍一下 nn.DataParallel 函数?
nn.DataParallel 函数
torch.nn.DataParallel(module, device_ids $\risingdotseq$ None, output_device $\ell=$ None, dim=0)
• 函数参数:
• module:即模型,此处注意,虽然输入数据被均分到不同gpu上,但每个gpu上都要拷贝一份模型;• device_ids:即参与训练的gpu列表,例如三块卡, device_ids $\dot{\mathbf{\Phi}}=[0,1,2$ ];• output_device:指定输出gpu,一般省略。在省略的情况下,默认为第一块卡,即索引为0的卡。此处有一个问题,输入计算是被几块卡均分的,但输出loss的计算是由这一张卡独自承担的,这就造成这张卡所承受的计算量要大于其他参与训练的卡。
使用实例
net $=$ torch.nn.Linear(100,1)
print(net)
print(’
net $=$ torch.nn.DataParallel(net, device_id ${\sf z}=[0,3]$ )
print(net)
输出
Linear(in_features $=10$ , out_features $=1$ , bias $=$ True) DataParallel( (module): Linear(in_feature $\mathrm{{s}}{=}10$ , out_features $=1$ , bias $:=$ True)
注:从输出结果可以看到nn.DataParallel()包裹起来了。然后我们就可以使用这个net来进行训练和预测了,它将自动在第0块GPU和第3块GPU上进行并行计算,然后自动的把计算结果进行了合并。
三、nn.DataParallel 函数 处理逻辑 介绍一下?
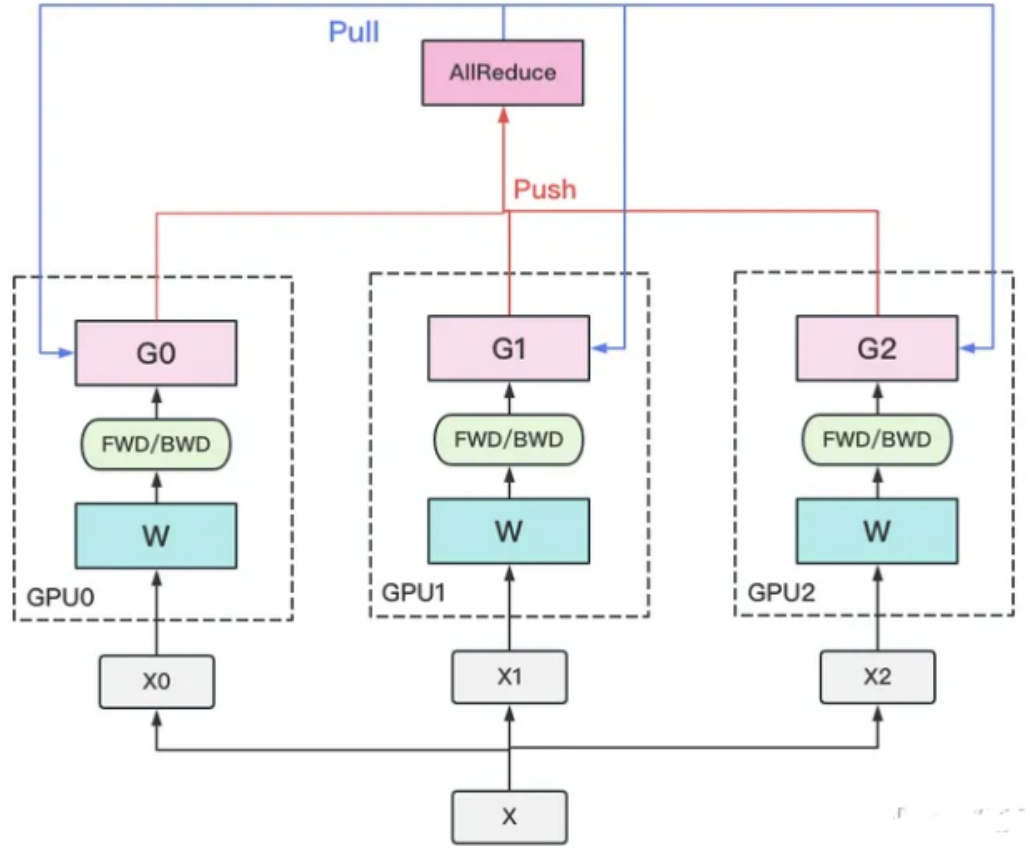
- 若干块计算GPU,如图中GPU0~GPU2;1块梯度收集GPU,如图中AllReduce操作所在GPU。
- 在每块计算GPU上都拷贝一份完整的模型参数。
- 把一份数据X(例如一个batch)均匀分给不同的计算GPU。
- 每块计算GPU做一轮FWD和BWD后,算得一份梯度G。
- 每块计算GPU将自己的梯度push给梯度收集GPU,做聚合操作。这里的聚合操作一般指梯度累加。当然也支持用户自定义。
- 梯度收集GPU聚合完毕后,计算GPU从它那pull下完整的梯度结果,用于更新模型参数W。更新完毕后,计算GPU上的模型参数依然保持一致。
- 聚合再下发梯度的操作,称为AllReduce。
注:前文说过,实现DP的一种经典编程框架叫“参数服务器”,在这个框架里,计算GPU称为Worker,梯度聚合GPU称为Server。在实际应用中,为了尽量减少通讯量,一般可选择一个Worker同时作为Server。比如可把梯度全发到GPU0上做聚合。需要再额外说明几点:1个Worker或者Server下可以不止1块GPU。
2. Server可以只做梯度聚合,也可以梯度聚合 $^{\cdot+}$ 全量参数更新一起做
四、nn.DataParallel 函数 常见问题及解答 有哪些?
4.1 多GPU计算减少了程序运行的时间?
虽然 使用 nn.DataParallel 函数 能够进行多GPU运算,但是 会导致 程序花费的时间 不减反增,这是为什么呢?在 第三节 提到,nn.DataParallel 函数 会将 每个batch 数据 平均分配到 不同 device 上 进行并行计算,计算完再返回来合并。这导致GPU之间的开关和通讯过程占了大部分的时间开销。注:可以使用watch -n 1 nvidia-smi这个命令来查看每1s各个GPU的运行情况,如果发现每个GPU的占用率均低于 $50%$ ,基本可以肯定使用多GPU计算所花的时间要比单GPU计算花的时间更长了。
4.2 如何保存和加载多GPU训练模型呢?
在 第三节 提到,nn.DataParallel 函数 会在 每个 device 上 复制一个模型,这样就导致 训练的不是一个模型 ,而是 多个模型,那么 如何 保持和加载 这些模型呢?
net $=$ torch.nn.Linear(10,1) # 先构造一个网络net $=$ torch.nn.DataParallel(net, device_id $\mathsf{s}=[0,3]$ ) #包裹起来torch.save(net.module.state_dict(), ‘./networks/multiGPU.h5’) #保存网络
# 加载网络
new_net $=$ torch.nn.Linear(10,1) new_net.load_state_dict(torch.load("./networks/multiGPU.h5"))
因为DataParallel实际上是一个nn.Module,所以我们在保存时需要多调用了一个net.module,模型和优化器都需要使用net.module来得到实际的模型和优化器。
4.3 为什么第一块卡的显存会占用的更多一些?
最后一个参数output_device一般情况下是省略不写的,那么默认就是在device_ids[0],也就是第一块卡上,也就解释了为什么第一块卡的显存会占用的比其他卡要更多一些。进一步说也就是当调用nn.DataParallel的时候,只是在input数据是并行的,但是output loss却不是这样的,每次都会在第一块GPU相加计算,这就造成了第一块GPU的负载远远大于剩余其他的显卡。
4.4 直接使用nn.DataParallel的时候,训练采用多卡训练,会出现一个warning?
UserWarning: Was asked to gather along dimension 0, but all input tensors were scalars; will instead unsqueeze and return a vector.
首先说明一下:
每张卡上的loss都是要汇总到第0张卡上求梯度,更新好以后把权重分发到其余卡。但是为什么会出现这个warning,这其实和nn.DataParallel中最后一个参数dim有关,其表示tensors被分散的维度,默认是0,nn.DataParallel将在dim0(批处理维度)中对数据进行分块,并将每个分块发送到相应的设备。单卡的没有这个warning,多卡的时候采用nn.DataParallel训练会出现这个warning,由于计算loss的时候是分别在多卡计算的,那么返回的也就是多个loss,你使用了多少个gpu,就会返回多少个loss。(有人建议DataParallel类应该有reduce和size_average参数,比如用于聚合输出的不同loss函数,最终返回一个向量,有多少个gpu,返回的向量就有几维。)
关于这个问题在pytorch官网的issues上有过讨论,下面简单摘出一些: https://github.com/pytorch/pytorch/issues/9811
似乎一看,这么求平均loss确实有不合理的地方。那么有什么好的解决办法呢,可以使用size_average $^{*=}$ False,reduce=True作为参数。每个GPU上的损失将相加,但不除以GPU上的批大小。然后将所有平行损耗相加,除以整批的大小,那么不管几块GPU最终得到的平均loss都是一样的。那pytorch贡献者也实现了这个loss求平均的功能,即通过gather的方式来求loss平均:https://github.com/pytorch/pytorch/pull/7973/commits/c285b3626a7a4dcbbddfba1a6b217a64a3f3f3be如果它们在一个有2个GPU的系统上运行,DP将采用多GPU路径,调用gather并返回一个向量。如果运行时有1个GPU可见,DP将采用顺序路径,完全忽略gather,因为这是不必要的,并返回一个标量。
4.5 device_ids 0 被占用问题
在运行此DataParallel模块之前,并行化模块必须在device_ids [0]上具有其参数和缓冲区。在执行DataParallel之前,会首先把其模型的参数放在device_ids[0]上,一看好像也没有什么毛病,其实有个小坑。我举个例子,服务器是八卡的服务器,刚好前面序号是0的卡被别人占用着,于是你只能用其他的卡来,比如你用2和3号卡,如果你直接指定device_ids=[2, 3]的话会出现模型初始化错误,类似于module没有复制到在device_ids[0]上去。那么你需要在运行train之前需要添加如下两句话指定程序可见的devices,如下:
os.environ[“CUDA_DEVICE_ORDER”] $=$ “PCI_BUS_ID” os.environ[“CUDA_VISIBLE_DEVICES”] = “2, $3^{\prime\prime}$
这两行代码后的意思:device_ids[0]默认是第2号卡,模型也会初始化在第2号卡上了,而不会占用第0号卡了。这里简单说一下设置上面两行代码后,那么对这个程序而言可见的只有2和3号卡,和其他的卡没有关系,这是物理上的号卡,逻辑上来说其实是对应0和1号卡,即device_ids[0]对应的就是第2号卡,device_ids[1]对应的就是第3号卡。
当然要保证上面这两行代码需要定义在下面这两行代码之前,一般放在train.py中import一些package之后:
device_ids $=$ [0, 1] net $=$ torch.nn.DataParallel(net, device_ids $=$ device_ids)
那么在训练过程中,优化器同样可以使用nn.DataParallel,如下两行代码:
optimizer $=$ torch.optim.SGD(net.parameters(), $\scriptstyle\mathrm{lr}=\mathrm{lr},$ ) optimizer $=$ nn.DataParallel(optimizer, device_ids $\left.\begin{array}{r l}\end{array}\right.=$ device_ids)
五、nn.DataParallel 函数 参数更新方式 ?
- DataLoader把数据通过多个worker读到主进程的内存中;
- 通过tensor的split语义,将一个batch的数据切分成多个更小的batch,然后分别送往不同的cuda设备;3. 在不同的cuda设备上完成前向计算,网络的输出被gather到主cuda设备上(初始化时使用的设备),loss而后在这里被计算出来;
- loss然后被scatter到每个cuda设备上,每个cuda设备通过BP计算得到梯度;
- 然后每个cuda设备上的梯度被reduce到主cuda设备上,然后模型权重在主cuda设备上获得更新;
- 在下一次迭代之前,主cuda设备将模型参数broadcast到其它cuda设备上,完成权重参数值的同步。注:broadcast是主进程将相同的数据分发给组里的每一个其它进程;scatter是主进程将数据的每一小部分给组里的其它进程;gather是将其它进程的数据收集过来;reduce是将其它进程的数据收集过来并应用某种操作(比如SUM)在gather和reduce概念前面还可以加上all,如all_gather,all_reduce,那就是多对多的关系了

六、nn.DataParallel 函数 优点 介绍一下?
nn.DataParallel是PyTorch提供的一种数据并行方式,适用于单机多GPU的情况,使用非常方便,只需要在模型前加上nn.DataParallel即可。nn.DataParallel的优点是使用简单、易于理解,而且能够充分利用多个GPU进行训练。
七、nn.DataParallel 函数 缺点 介绍一下?
• 内存占用:nn.DataParallel会将整个模型复制到每个GPU上,因此需要占用大量的GPU内存。当模型非常大时,可能会导致内存不足。
• 数据通信:nn.DataParallel使用的是数据并行方式,需要将每个GPU上的梯度进行汇总,因此需要进行大量的数据通信,可能会导致训练速度的下降。
• 要求所有的GPU都在同一个节点上(不支持分布式)。
• 不能使用Apex进行混合精度训练。
八、nn.DataParallel 函数 实战?
r’’’ DP 分布式训练
其实 DP 分布式训练 异常的简单 在使用torch.nn.DataParallel()进行分布式训练时 只需要注意以下几点即可:
- 关于 model 加载到GPU器件上的时机 : model的处理顺序最好遵循以下的步骤 : 首先是 get model 然后是 model.to(device) 最后是use DP.
补充一句, model一般不是纯model 而是 modelwithloss 也就是说在你 get model 时获取的模型不仅仅只有网络模型, 同时也包含用于计算的loss的模型(比如检测头)
- 关于 训练数据 加载到GPU器件上的时机 : 用于训练的数据为了方便 我们在这里统一称其为batch, 其实在这个batch数据中, 并非仅含有网络的输入数据input,
大部分情况下也会含有用于训练的标记数据target – (batch由input和target两类数据构成), 而加载一个batch的数据到GPU器件中的时机,
最好选择在训练的一个iter过程中的model进行forward之前, 完成batch数据加载到器件( 也就是 to(device) )的操作 — 这里需要注意的是,
不是训练的一个epoch过程 而是训练的一个iter过程.补: 整个train的过程包含很多个epoch, 而一个epoch的过程又包含很多个iter, 一个
epoch过程的iter数量等于: 数据集样本数量 / batch_size (drop_las $\scriptstyle=\mathrm{T}$ or F 这个数值不一
样的) 这个这里不解释有问题可以去看看d2的代码.3. 关于batch_size与GPU数量的对应 : 一般而言batch_size的数量大于或等于GPU的数量
如果batch_size大于GPU的数量, 则要保证batch_size可以被GPU数整除但是, 如果你需要设置的batch_size数不能被GPU数整除, 你需要进行以下操作:(1) 确定主GPU分得的样本数量 (2) 确定其他GPU所分得的样本数量 (3) 对
data_parallel进行改写, 添加chunk_size的功能, 具体参见CenterTrack项目中的
data_parallel.py4. 关于DataParallel()的参数设置以及使用 :module - 用于并行训练的model, 使用的前提是model已经被加载到器件中( 且已经被
加载到device[0]中, 就这一点官方给出的说法可以参考如下)The parallelized :attr:`module` must have its parameters and
buffers on ``device_ids[0]``before running this :class:`~torch.nn.DataParallel`module.device_ids - 参与训练的 GPU idoutput_device - 指定用于汇总梯度的 GPU id 默认为 device_ids[0]dim - 默认为0 这个不需要改动
使用 DP 进行并行训练的核心主干代码
import torch
import torch.nn as nn
import torch.optim as optim
gpus $=$ [0, 1, 2, 3] torch.cuda.set_device(‘cuda:{}’.format(gpus[0]))
train_dataset $=$ … # build train datasettrain_loader $=$ torch.utils.data.DataLoader(train_dataset, batch_size=…# batch_size 的设置 最好要能被 GPU 数量 整除,如果不能,则要重新改动一下data_parallel 即可
改动的代码参见 centertrack 中的 data_parallel —- 其实就是添加了一个 chunk_size的功能
model $=…\sharp$ get model or you can get model-with-loss
model $=$ nn.DataParallel(model.to(device), device_ids $=$ gpus, output_device $=$ gpus[0])#
model to device and use DP
optimizer $=$ optim.SGD(model.parameters()) # get optimizer
for epoch in range(100):
for batch_idx, (images, target) in enumerate(train_loader):images $=$ images.cuda(non_blocking=True)target $=$ target.cuda(non_blocking $\because$ True)# 一般这里可以合并为一个功能 就是输出
的是一个 batch 包括输入数据 input 和 训练标记数据 targetoutput $=$ model(images)loss $=$ criterion(output, target)# 一般这里也可以合并为一个功能 就是将model和
loss合并为一个整体的模型 modelwithloss 然后同时输出 output 和 lossoptimizer.zero_grad()loss.backward()optimizer.step()
文章作者 大模型
上次更新 2025-03-09