52_图解分布式训练_八_ZeRO_学习
文章目录
图解分布式训练(八)—— ZeRO 学习
来自: AiGC面试宝典
扫码 查看更
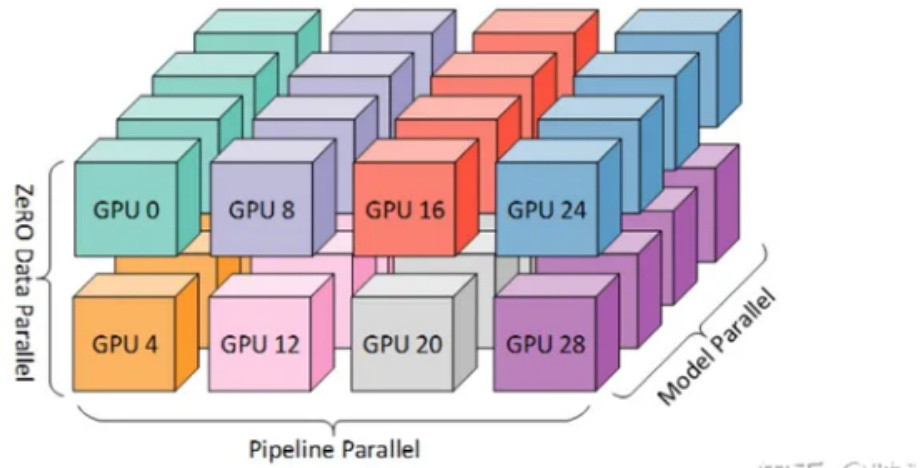
一、什么是 3D 并行?
3D 并行可以让大型模型以非常有效的方式进行训练
二、3D 并行 策略有哪些?
• DataParallel (DP) • TensorParallel (TP) • PipelineParallel (PP)
2.1 DataParallel (DP)
• 介绍:假设有N张卡,每张卡都保存一个模型,每一次迭代(iteration/step)都将batch数据分割成N个等大小的micro-batch,每张卡根据拿到的micro-batch数据独立计算梯度,然后调用AllReduce计算梯度均值,每张卡再独立进行参数更新。
• 举例说明:
假设模型有三层:L0, L1, L2
每层有两个神经元 # 两张卡
GPU0: L0 | L1 | L2 a0 | b0 | c0 a1 | b1 | c1GPU1: L0 | L1 | L2 a0 | b0 | c0 a1 | b1 | c1
2.2 TensorParallel (TP)
• 介绍:每个张量都被分成多个块,因此不是让整个张量驻留在单个 GPU 上,而是张量的每个分片都驻留在其指定的 GPU 上。在处理过程中,每个分片在不同的 GPU 上分别并行处理,最终结果在步骤结束时同步。这也被称作横向并行。
• 举例说明:
假设模型有三层:L0, L1, L2
每层有两个神经元 # 两张卡
GPU0: L0 | L1 | L2 a0 | b0 | c0 a1 | b1 | c1GPU1: L0 | L1 | L2 a0 | b0 | c0 a1 | b1 | c1
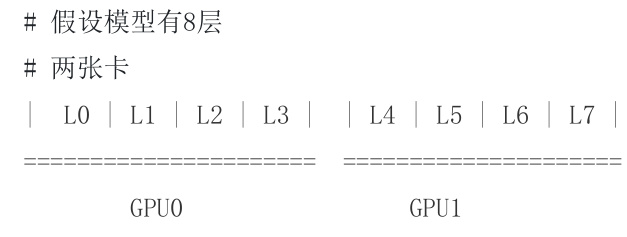
2.3 PipelineParallel (PP)
• 介绍:模型在多个 GPU 上垂直(层级)拆分,因此只有模型的一个或多个层放置在单个 GPU 上。每个GPU 并行处理管道的不同阶段,并处理一小部分批处理。
• 举例说明:
三、为什么需要 ZeRO?
虽然 DataParallel (DP) 因为简单易实现,所以目前应用相比于其他两种 广泛,但是 由于 DataParallel (DP) 需要每张卡都存储一个模型,导致 显存大小 成为 制约模型规模 的 主要因素。
既然 每张卡都存储一个模型 会 增加 模型训练过程中的显存占用,那么 是否可以 让 每行卡训练 1/N 的模型参数,然后 合并起来就是一个完整模型呢? 这样,随着卡数的增加,每张卡 用于 模型训练的显存占用将减低,能够训练的模型也就越大。
如今训练大模型离不开各种分布式并行策略,ZeRO系列技术就是一种显存优化的数据并行方案,旨在训练超大规模的语言模型。
四、ZeRO 的 核心思想是什么?
去除数据并行中的冗余参数,使每张卡只存储一部分模型状态,从而减少显存占用。
五、ZeRO 显存如何分配?
ZeRO将模型训练阶段中每张卡的显存内容分为两类:
• 模型状态:包括参数、梯度和优化器状态,其中优化器状态占比 $75%$ 。
• 剩余状态:除了模型状态之外的显存占用,包括激活值、各种临时缓冲区以及无法使用的显存碎片。
来看一个例子,GPT-2含有1.5B个参数,如果用fp16格式(混合精度),只需要3GB显存,但是模型状态实际上需要耗费24GB!所以模型状态就成了头号显存杀手,它也是ZeRO的重点优化对象。而其中优化器状态又是第一个要被优化的。
六、ZeRO 优化策略是怎么样?
针对模型状态的存储优化(去除冗余),ZeRO使用的方法是分片,即每张卡只存 1/N的模型状态量,这样系统内只维护一份模型状态。
ZeRO 具有三个主要的优化阶段(ZeRO-1,ZeRO-2,ZeRO-3),它们对应于优化器状态(optimizerstates)、梯度(gradients)和参数(parameters)的分片。累积启用时:
• 优化器状态分区 $(P o s)-$ 内存减少 4 倍,通信量与数据并行性相同
• 添加梯度分区 $(P o s+g)-$ 内存减少 8 倍,通信量与数据并行性相同
• 添加参数分区 $^{\prime}P o s^{+}g^{+}p)$ – 内存减少与数据并行度 Nd 成线性关系。例如,拆分为 64 个 GPU ( Nd ${=}64$ ) 内存将减少到 1/64 。GPU 通信量略有增加 $50%$ 。
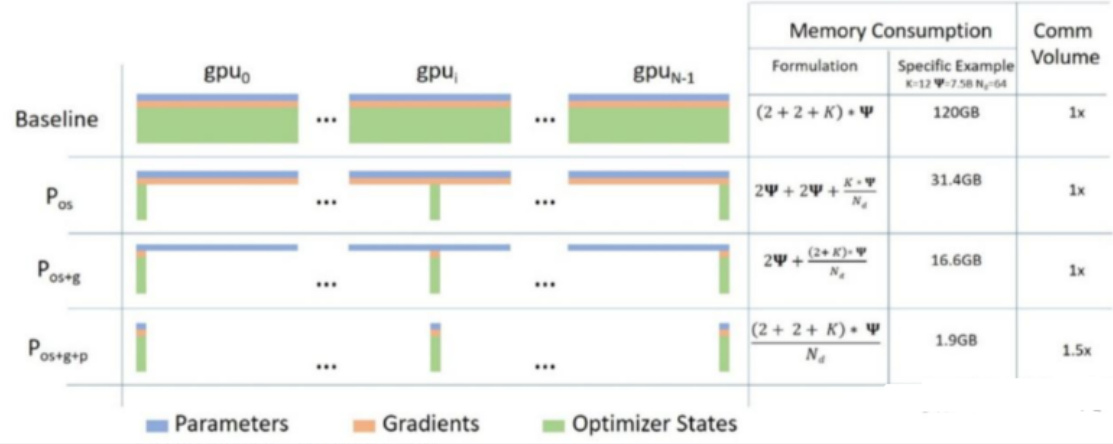
注:图中Memory Consumption 第二列给出了一个示例: $\mathsf{k}{=}12,\Phi{=}7.5\mathsf{B},\mathsf{N d}{=}64$ ,可以看到随着ZeRO 阶段深入,显存优化相当明显。
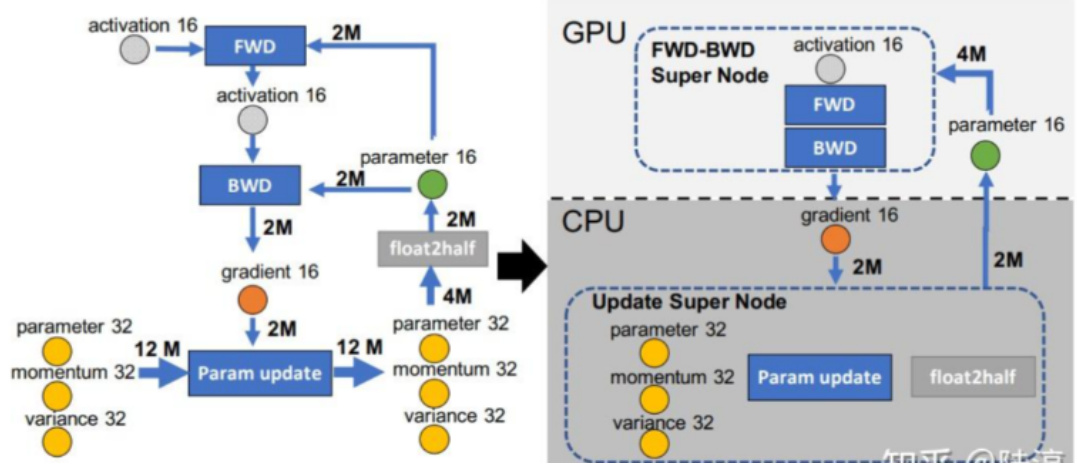
一张卡训不了大模型,根因是显存不足,ZeRO-Offload则将训练阶段的某些模型状态下放(offload)到内存以及CPU计算,即显存不足,内存来补。相比于昂贵的显存,内存廉价多了。
下图是某一层的一次迭代过程,使用了混合精度训练,前向计算(FWD)需要用到上一次的激活值(activation)和本层的参数(parameter),反向传播(BWD)也需要用到激活值和参数计算梯度,当我们用Adam优化器进行参数更新时,假设模型参数量是 M ,在混合精度训练的前提下,边的权重要么是2M(fp16),要么是4M(fp32)。为了不降低计算效率,将前两个节点放在GPU,后两个节点不但计算量小还需要和Adam状态打交道,所以放在CPU上,Adam状态自然也放在内存中,为了简化数据图,将前两个节点融合成一个节点FWD-BWD Super Node,将后两个节点融合成一个节点Update Super Node,沿着gradient 16和parameter 16把数据流图切分为两部分,分布对应GPU和CPU
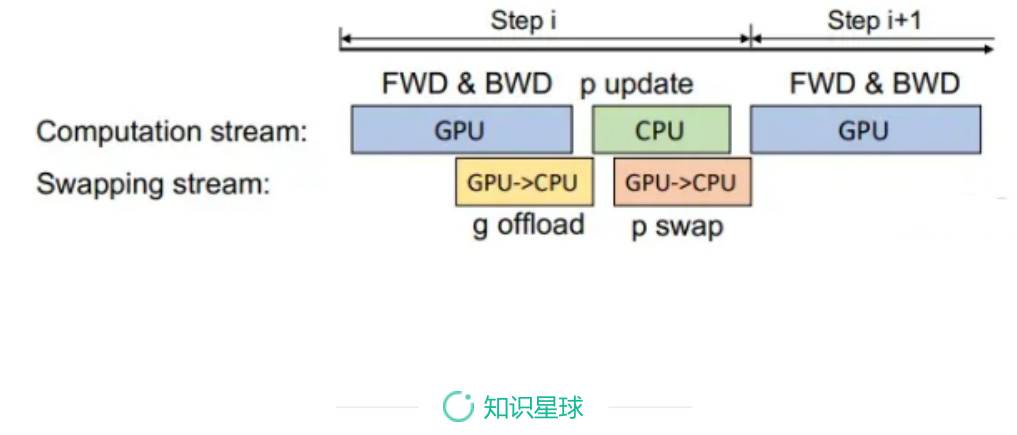
七、ZeRO Offload后的计算流程是怎么样?
• 在GPU上面进行前向和后向计算,将梯度传给CPU。同时为了提高效率,可以将计算和通信并行起来,GPU在反向传播阶段,可以待梯度值填满bucket后,一边计算新的梯度一边将bucket传输给CPU,当反向传播结束,CPU基本上已经有最新的梯度值了;
• cpu进行参数更新,再将更新后的参数传给GPU。
文章作者 大模型
上次更新 2025-03-09