01|堆、栈、RAII:C++里该如何管理资源?
文章目录
你好,我是吴咏炜。
今天我们就正式开启了 C++ 的学习之旅,作为第一讲,我想先带你把地基打牢。我们来学习一下内存管理的基本概念,大致的学习路径是:先讲堆和栈,然后讨论 C++ 的特色功能 RAII。掌握这些概念,是能够熟练运用 C++ 的基础。
基本概念
堆,英文是 heap,在内存管理的语境下,指的是动态分配内存的区域。这个堆跟数据结构里的堆不是一回事。这里的内存,被分配之后需要手工释放,否则,就会造成内存泄漏。
C++ 标准里一个相关概念是自由存储区,英文是 free store,特指使用 new 和 delete 来分配和释放内存的区域。一般而言,这是堆的一个子集:
new和delete操作的区域是 free storemalloc和free操作的区域是 heap
但 new 和 delete 通常底层使用 malloc 和 free 来实现,所以 free store 也是 heap。鉴于对其区分的实际意义并不大,在本专栏里,除非另有特殊说明,我会只使用堆这一术语。
栈,英文是 stack,在内存管理的语境下,指的是函数调用过程中产生的本地变量和调用数据的区域。这个栈和数据结构里的栈高度相似,都满足“后进先出”(last-in-first-out 或 LIFO)。
RAII,完整的英文是 Resource Acquisition Is Initialization,是 C++ 所特有的资源管理方式。有少量其他语言,如 D、Ada 和 Rust 也采纳了 RAII,但主流的编程语言中,C++ 是唯一一个依赖 RAII 来做资源管理的。
RAII 依托栈和析构函数,来对所有的资源——包括堆内存在内——进行管理。对 RAII 的使用,使得 C++ 不需要类似于 Java 那样的垃圾收集方法,也能有效地对内存进行管理。RAII 的存在,也是垃圾收集虽然理论上可以在 C++ 使用,但从来没有真正流行过的主要原因。
接下来,我将会对堆、栈和 RAII 进行深入的探讨。
堆
从现代编程的角度来看,使用堆,或者说使用动态内存分配,是一件再自然不过的事情了。下面这样的代码,都会导致在堆上分配内存(并构造对象)。
// C++
auto ptr = new std::vector
// Java
ArrayList
Python
lst = list()
从历史的角度,动态内存分配实际上是较晚出现的。由于动态内存带来的不确定性——内存分配耗时需要多久?失败了怎么办?等等——至今仍有很多场合会禁用动态内存,尤其在实时性要求比较高的场合,如飞行控制器和电信设备。不过,由于大家多半对这种用法比较熟悉,特别是从 C 和 C++ 以外的其他语言开始学习编程的程序员,所以提到内存管理,我们还是先讨论一下使用堆的编程方式。
在堆上分配内存,有些语言可能使用 new 这样的关键字,有些语言则是在对象的构造时隐式分配,不需要特殊关键字。不管哪种情况,程序通常需要牵涉到三个可能的内存管理器的操作:
- 让内存管理器分配一个某个大小的内存块
- 让内存管理器释放一个之前分配的内存块
- 让内存管理器进行垃圾收集操作,寻找不再使用的内存块并予以释放
C++ 通常会做上面的操作 1 和 2。Java 会做上面的操作 1 和 3。而 Python 会做上面的操作 1、2、3。这是语言的特性和实现方式决定的。
需要略加说明的是,上面的三个操作都不简单,并且彼此之间是相关的。
第一,分配内存要考虑程序当前已经有多少未分配的内存。内存不足时要从操作系统申请新的内存。内存充足时,要从可用的内存里取出一块合适大小的内存,做簿记工作将其标记为已用,然后将其返回给要求内存的代码。
需要注意到,绝大部分情况下,可用内存都会比要求分配的内存大,所以代码只被允许使用其被分配的内存区域,而剩余的内存区域仍属于未分配状态,可以在后面的分配过程中使用。另外,如果内存管理器支持垃圾收集的话,分配内存的操作还可能会触发垃圾收集。
第二,释放内存不只是简单地把内存标记为未使用。对于连续未使用的内存块,通常内存管理器需要将其合并成一块,以便可以满足后续的较大内存分配要求。毕竟,目前的编程模式都要求申请的内存块是连续的。
第三,垃圾收集操作有很多不同的策略和实现方式,以实现性能、实时性、额外开销等各方面的平衡。由于 C++ 里通常都不使用垃圾收集,所以就不是我们专栏的重点,不再展开讲解。
下面这张图展示了一个简单的分配过程:


注意在图 1e 的状态下,内存管理器是满足不了长度大于 4 的内存分配要求的;而在图 1f 的状态,则长度小于等于 7 的单个内存要求都可以得到满足。
当然,这只是一个简单的示意,只是为了让你能够对这个过程有一个大概的感性认识。在不考虑垃圾收集的情况下,内存需要手工释放;在此过程中,内存可能有碎片化的情况。比如,在图 1d 的情况下,虽然总共剩余内存为 6,但却满足不了长度大于 4 的内存分配要求。
幸运的是,大部分软件开发人员都不需要担心这个问题。内存分配和释放的管理,是内存管理器的任务,一般情况下我们不需要介入。我们只需要正确地使用 new 和 delete。每个 new 出来的对象都应该用 delete 来释放,就是这么简单。
但真的很简单、可以高枕无忧了吗?
事实说明,漏掉 delete 是一种常见的情况,这叫“内存泄漏”——相信你一定听到过这个说法。为什么呢?
我们还是看一些代码例子。
void foo()
{
bar* ptr = new bar();
…
delete ptr;
}
这个很简单吧,但是却存在两个问题:
- 中间省略的代码部分也许会抛出异常,导致最后的
delete ptr得不到执行。 - 更重要的,这个代码不符合 C++ 的惯用法。在 C++ 里,这种情况下有 99% 的可能性不应该使用堆内存分配,而应使用栈内存分配。这样写代码的,估计可能是从 Java 转过来的(偷笑)——但我真见过这样的代码。
而更常见、也更合理的情况,是分配和释放不在一个函数里。比如下面这段示例代码:
bar* make_bar(…)
{
…
try {
bar* ptr = new bar();
…
}
catch (…) {
delete ptr;
throw;
}
return ptr;
}
void foo()
{
…
bar* ptr = make_bar(…)
…
delete ptr;
}
这样的话,会漏 delete 的可能性是不是大多了?有关这个问题的解决方法,我们在下一讲还会提到。
好,堆我们暂时就讨论到这儿。下面,我们看看更符合 C++ 特性的栈内存分配。
栈
我们先来看一段示例代码,来说明 C++ 里函数调用、本地变量是如何使用栈的。当然,这一过程取决于计算机的实际架构,具体细节可能有所不同,但原理上都是相通的,都会使用一个后进先出的结构。
void foo(int n)
{
…
}
void bar(int n)
{
int a = n + 1;
foo(a);
}
int main()
{
…
bar(42);
…
}
这段代码执行过程中的栈变化,我画了下面这张图来表示:
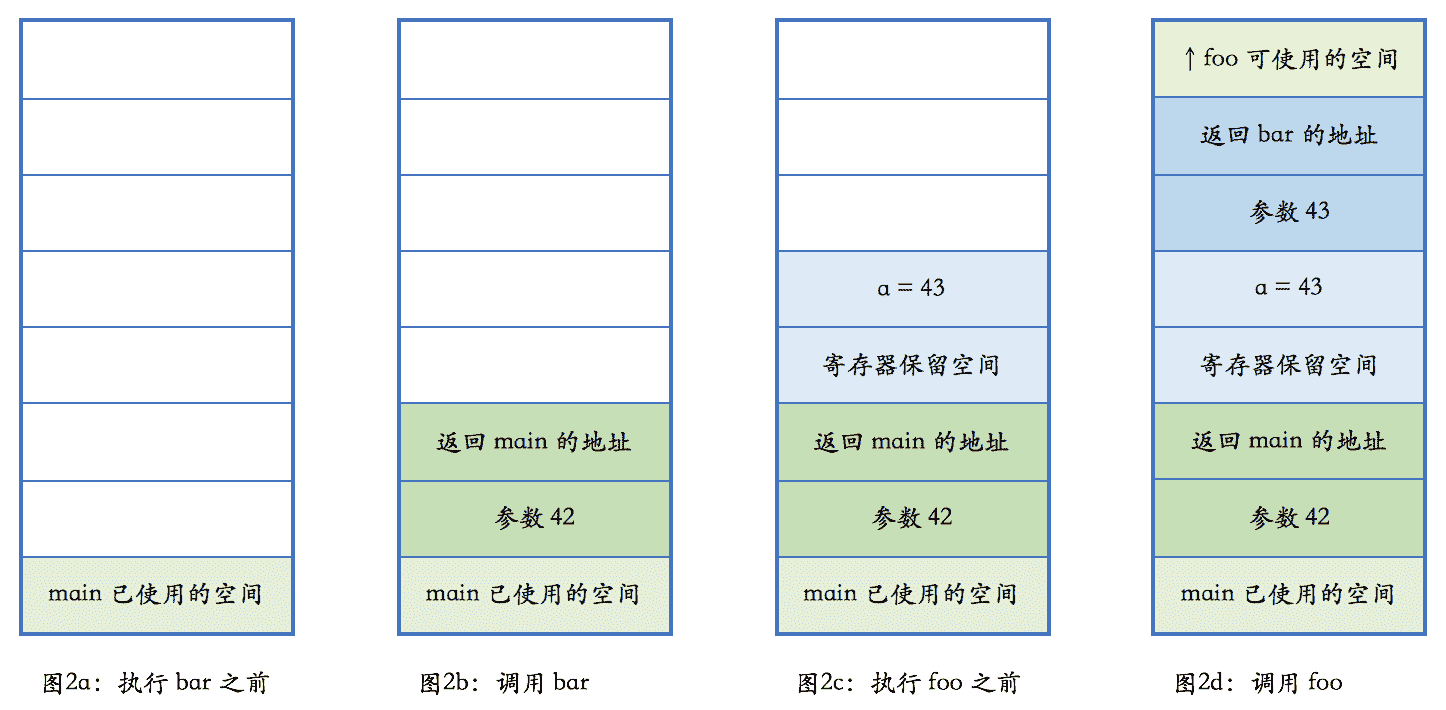
在我们的示例中,栈是向上增长的。在包括 x86 在内的大部分计算机体系架构中,栈的增长方向是低地址,因而上方意味着低地址。任何一个函数,根据架构的约定,只能使用进入函数时栈指针向上部分的栈空间。当函数调用另外一个函数时,会把参数也压入栈里(我们此处忽略使用寄存器传递参数的情况),然后把下一行汇编指令的地址压入栈,并跳转到新的函数。新的函数进入后,首先做一些必须的保存工作,然后会调整栈指针,分配出本地变量所需的空间,随后执行函数中的代码,并在执行完毕之后,根据调用者压入栈的地址,返回到调用者未执行的代码中继续执行。
注意到了没有,本地变量所需的内存就在栈上,跟函数执行所需的其他数据在一起。当函数执行完成之后,这些内存也就自然而然释放掉了。我们可以看到:
- 栈上的分配极为简单,移动一下栈指针而已。
- 栈上的释放也极为简单,函数执行结束时移动一下栈指针即可。
- 由于后进先出的执行过程,不可能出现内存碎片。
顺便说一句,图 2 中每种颜色都表示某个函数占用的栈空间。这部分空间有个特定的术语,叫做栈帧(stack frame)。GCC 和 Clang 的命令行参数中提到 frame 的,如 -fomit-frame-pointer,一般就是指栈帧。
前面例子的本地变量是简单类型,C++ 里称之为 POD 类型(Plain Old Data)。对于有构造和析构函数的非 POD 类型,栈上的内存分配也同样有效,只不过 C++ 编译器会在生成代码的合适位置,插入对构造和析构函数的调用。
这里尤其重要的是:编译器会自动调用析构函数,包括在函数执行发生异常的情况。在发生异常时对析构函数的调用,还有一个专门的术语,叫栈展开(stack unwinding)。事实上,如果你用 MSVC 编译含异常的 C++ 代码,但没有使用上一讲说过的 /EHsc 参数,编译器就会报告:
warning C4530: C++ exception handler used, but unwind semantics are not enabled. Specify /EHsc
下面是一段简短的代码,可以演示栈展开:
#include <stdio.h>
class Obj {
public:
Obj() { puts(“Obj()”); }
~Obj() { puts("~Obj()"); }
};
void foo(int n)
{
Obj obj;
if (n == 42)
throw “life, the universe and everything”;
}
int main()
{
try {
foo(41);
foo(42);
}
catch (const char* s) {
puts(s);
}
}
执行代码的结果是:
Obj()
~Obj()
Obj()
~Obj()
life, the universe and everything
也就是说,不管是否发生了异常,obj 的析构函数都会得到执行。
在 C++ 里,所有的变量缺省都是值语义——如果不使用 * 和 & 的话,变量不会像 Java 或 Python 一样引用一个堆上的对象。对于像智能指针这样的类型,你写 ptr->call() 和 ptr.get(),语法上都是对的,并且 -> 和 . 有着不同的语法作用。而在大部分其他语言里,访问成员只用 .,但在作用上实际等价于 C++ 的 ->。这种值语义和引用语义的区别,是 C++ 的特点,也是它的复杂性的一个来源。要用好 C++,就需要理解它的值语义的特点。
对堆和栈有了基本了解之后,我们继续往下,聊一聊 C++ 的重要特性 RAII。
RAII
C++ 支持将对象存储在栈上面。但是,在很多情况下,对象不能,或不应该,存储在栈上。比如:
- 对象很大;
- 对象的大小在编译时不能确定;
- 对象是函数的返回值,但由于特殊的原因,不应使用对象的值返回。
常见情况之一是,在工厂方法或其他面向对象编程的情况下,返回值类型是基类。下面的例子,是对工厂方法的简单演示:
enum class shape_type {
circle,
triangle,
rectangle,
…
};
class shape { … };
class circle : public shape { … };
class triangle : public shape { … };
class rectangle : public shape { … };
shape* create_shape(shape_type type)
{
…
switch (type) {
case shape_type::circle:
return new circle(…);
case shape_type::triangle:
return new triangle(…);
case shape_type::rectangle:
return new rectangle(…);
…
}
}
这个 create_shape 方法会返回一个 shape 对象,对象的实际类型是某个 shape 的子类,圆啊,三角形啊,矩形啊,等等。这种情况下,函数的返回值只能是指针或其变体形式。如果返回类型是 shape,实际却返回一个 circle,编译器不会报错,但结果多半是错的。这种现象叫对象切片(object slicing),是 C++ 特有的一种编码错误。这种错误不是语法错误,而是一个对象复制相关的语义错误,也算是 C++ 的一个陷阱了,大家需要小心这个问题。
那么,我们怎样才能确保,在使用 create_shape 的返回值时不会发生内存泄漏呢?
答案就在析构函数和它的栈展开行为上。我们只需要把这个返回值放到一个本地变量里,并确保其析构函数会删除该对象即可。一个简单的实现如下所示:
class shape_wrapper {
public:
explicit shape_wrapper(
shape* ptr = nullptr)
: ptr_(ptr) {}
~shape_wrapper()
{
delete ptr_;
}
shape* get() const { return ptr_; }
private:
shape* ptr_;
};
void foo()
{
…
shape_wrapper ptr_wrapper(
create_shape(…));
…
}
如果你好奇 delete 空指针会发生什么的话,那答案是,这是一个合法的空操作。在 new 一个对象和 delete 一个指针时编译器需要干不少活的,它们大致可以如下翻译:
// new circle(…)
{
void* temp = operator new(sizeof(circle));
try {
circle* ptr =
static_cast<circle*>(temp);
ptr->circle(…);
return ptr;
}
catch (…) {
operator delete(ptr);
throw;
}
}
if (ptr != nullptr) {
ptr->~shape();
operator delete(ptr);
}
也就是说,new 的时候先分配内存(失败时整个操作失败并向外抛出异常,通常是 bad_alloc),然后在这个结果指针上构造对象(注意上面示意中的调用构造函数并不是合法的 C++ 代码);构造成功则 new 操作整体完成,否则释放刚分配的内存并继续向外抛构造函数产生的异常。delete 时则判断指针是否为空,在指针不为空时调用析构函数并释放之前分配的内存。
回到 shape_wrapper 和它的析构行为。在析构函数里做必要的清理工作,这就是 RAII 的基本用法。这种清理并不限于释放内存,也可以是:
- 关闭文件(
fstream的析构就会这么做) - 释放同步锁
- 释放其他重要的系统资源
例如,我们应该使用:
std::mutex mtx;
void some_func()
{
std::lock_guardstd::mutex guard(mtx);
// 做需要同步的工作
}
而不是:
std::mutex mtx;
void some_func()
{
mtx.lock();
// 做需要同步的工作……
// 如果发生异常或提前返回,
// 下面这句不会自动执行。
mtx.unlock();
}
顺便说一句,上面的 shape_wrapper 差不多就是个最简单的智能指针了。至于完整的智能指针,我们留到下一讲继续学习。
内容小结
本讲我们讨论了 C++ 里内存管理的一些基本概念,强调栈是 C++ 里最“自然”的内存使用方式,并且,使用基于栈和析构函数的 RAII,可以有效地对包括堆内存在内的系统资源进行统一管理。
课后思考
最后留给你一道思考题。shape_wrapper 和智能指针比起来,还缺了哪些功能?欢迎留言和我分享你的观点。
参考资料
[1] Wikipedia, “Memory management”. https://en.wikipedia.org/wiki/Memory_management
[2] Wikipedia, “Stack-based memory allocation”. https://en.wikipedia.org/wiki/Stack-based_memory_allocation
[3] Wikipedia, “Resource acquisition is initialization”. https://en.wikipedia.org/wiki/RAII
[3a] 维基百科,“RAII”. https://zh.wikipedia.org/zh-cn/RAII
[4] Wikipedia, “Call stack”. https://en.wikipedia.org/wiki/Call_stack
[5] Wikipedia, “Object slicing”. https://en.wikipedia.org/wiki/Object_slicing
[6] Stack Overflow, “Why does the stack address grow towards decreasing memory addresses?” https://stackoverflow.com/questions/4560720/why-does-the-stack-address-grow-towards-decreasing-memory-addresses
注意:有些条目虽然有中文版,但内容太少;此处单独标出中文版条目的,则是内容比较全面、能够补充本专栏内容的情况。
文章作者 anonymous
上次更新 2024-02-19