05|运行时机制:程序如何运行,你有发言权
文章目录
你好,我是宫文学。在语义分析之后,编译过程就开始进入中后端了。
经过前端阶段的处理分析,编译器已经充分理解了源代码的含义,准备好把前端处理的结果(带有标注信息的 AST、符号表)翻译成目标代码了。
我在第 1 讲也说过,如果想做好翻译工作,编译器必须理解目标代码。而要理解目标代码,它就必须要理解目标代码是如何被执行的。通常情况下,程序有两种执行模式。
第一种执行模式是在物理机上运行。针对的是 C、C++、Go 这样的语言,编译器直接将源代码编译成汇编代码(或直接生成机器码),然后生成能够在操作系统上运行的可执行程序。为了实现它们的后端,编译器需要理解程序在底层的运行环境,包括 CPU、内存、操作系统跟程序的互动关系,并要能理解汇编代码。
第二种执行模式是在虚拟机上运行。针对的是 Java、Python、Erlang 和 Lua 等语言,它们能够在虚拟机上解释执行。这时候,编译器要理解该语言的虚拟机的运行机制,并生成能够被执行的 IR。
理解了这两种执行模式的特点,我们也就能弄清楚用高级语言编写的程序是如何运行的,进而也就理解了编译器在中后端的任务是什么。接下来,我们就从最基础的物理机模式开始学习吧。
在物理机上运行
在计算机发展的早期,科学家们确立了计算机的结构,并一直延续至今,这种结构就是冯·诺依曼结构。它的主要特点是:数据和指令不加区别,混合存储在同一个存储器中(即主存,或叫做内存);用一个指令指针指向内存中指令的位置,CPU 就能自动加载这个位置的指令并执行。
在 x86 架构下,这个指针是 eip 寄存器(32 位模式)或 rip 寄存器(64 位模式)。一条指令执行完毕,指令指针自动增加,并执行下一条指令。如果遇到跳转指令,则跳转到另一个地址去执行。
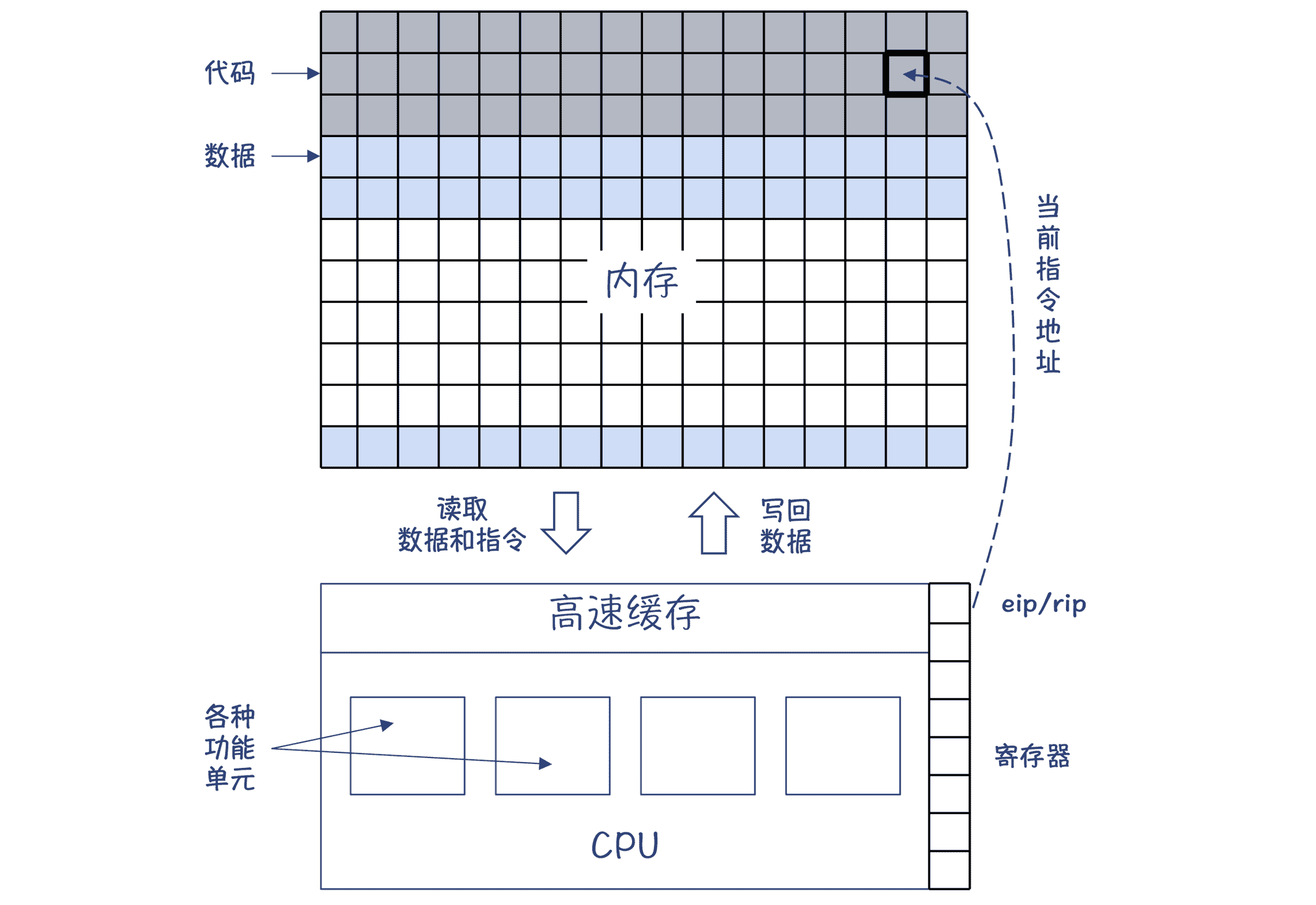
图 1:计算机的运行机制
这其实就是计算机最基本的运行原理。这样,你就可以在大脑中建立起像图 1 那样的直观结构。
通过图 1,你会看到,计算机指令的执行基本上只跟两个硬件相关:一个是 CPU,一个是内存。
CPU
CPU 是计算机的核心。从硬件构成方面,我们需要知道它的三个信息:
- 第一,CPU 上面有寄存器,并且可以直接由指令访问。寄存器的读写速度非常快,大约是内存的 100 倍。所以我们编译后的代码,要尽量充分利用寄存器,而不是频繁地去访问内存。
- 第二,CPU 有高速缓存,并且可能是多级的。高速缓存也比内存快。CPU 在读取指令和数据的时候,不是一次读取一条,而是读取相邻的一批数据,放到高速缓存里。接下来要读取的数据,很可能已经在高速缓存里了,通过这种机制来提高运行性能。因此,编译器要尽量提高缓存的命中率。
- 第三,CPU 内部有多个功能单元,有的负责计算,有的负责解码,等等。所以,一个指令可以被切分成多个执行阶段,每个阶段在不同的功能单元上运行,这为实现指令级并行提供了硬件基础。在第 8 讲,我还会和你详细解释这个话题。
好了,掌握了这个知识点,我们可以继续往下学习了。我们说,CPU 是运行指令的地方,那指令到底是什么样子的呢?
我们知道,CPU 有多种不同的架构,比如 x86 架构、ARM 架构等。不同架构的 CPU,它的指令是不一样的。不过它们的共性之处在于,指令都是 01 这样的机器码。为了便于理解,我们通常会用汇编代码来表示机器指令。比如,b=a+2 指令对应的汇编码可能是这样的:
movl -4(%rbp), %eax #把%rbp-4 内存地址的值拷贝到%eax 寄存器
addl $2, %eax #把 2 加到%eax 寄存器
movl %eax, -8(%rbp) #把%eax 寄存器的值保存回内存,地址是%rbp-8
上面的汇编代码采用的是 GNU 汇编器规定的格式。每条指令都包含了两部分:操作码(opcode)和操作数(oprand)。

图 2:汇编代码示例
操作码是让 CPU 执行的动作。这段示例代码中,movl、addl 是助记符(Assembly Mnemonic),其中的 mov 和 add 是指令,l 是后缀,表示操作数的位数。
而操作数是指令的操作对象,它可以是常数、寄存器和某个内存地址。图 2 示例的汇编代码中,“$2”就是个常数,在指令里我们把它叫做立即数;而“%eax”是访问一个寄存器,其中 eax 是寄存器的名称;而带有括号的“-4(%rbp)”,则是对内存的访问方式,这个内存的地址是在 rbp 寄存器的值的基础上减去 4。
如果你还想对指令、汇编代码有更多的了解,可以再去查阅些资料学习,比如去参考下我的《编译原理之美》中的第22、23、31这几讲。
这里要提一下,虽然程序觉得自己一直在使用 CPU,但实际上,背后有操作系统在做调度。操作系统是管理系统资源的,而 CPU 是计算机的核心资源,操作系统会把 CPU 的时间划分成多个时间片,分配给不同的程序使用,每个程序实际上都是在“断断续续”地使用 CPU,这就是操作系统的分时调度机制。在后面课程里讨论并发的时候,我们会更加深入地探讨这个机制。
内存
好了,接下来我说说执行指令相关的另一个硬件:内存。
程序在运行时,操作系统会给它分配一块虚拟的内存空间,让它可以在运行期内使用。内存中的每个位置都有一个地址,地址的长度决定了能够表示多大空间,这叫做寻址空间。我们目前使用的都是 64 位的机器,理论上,你可以用一个 64 位的长整型来表示内存地址。
不过,由于我们根本用不了这么大的内存,所以 AMD64 架构的寻址空间只使用了 48 位。但这也有 256TB,远远超出了一般情况下的需求。所以,像 Windows 这样的操作系统还会给予进一步的限制,缩小程序的寻址空间。

图 3:48 位寻址空间有多大
但即使是在加了限制的情况下,程序在逻辑上可使用的内存一般也会大于实际的物理内存。不过进程不会一下子使用那么多的内存,只有在向操作系统申请内存的时候,操作系统才会把一块物理内存,映射成进程寻址空间内的一块内存。对应到图 4 中,中间一条是物理内存,上下两条是两个进程的寻址空间,它们要比物理内存大。
对于有些物理内存的内容,还可以映射进多个进程的地址空间,以减少内存的使用。比如说,如果进程 1 和进程 2 运行的是同一个可执行文件,那么程序的代码段是可以在两个进程之间共享的。你在图中可以看到这种情况。

图 4:物理内存和逻辑内存的关系
另外,对于已经分配给进程的内存,如果进程很长时间不用,操作系统会把它写到磁盘上,以便腾出更多可用的物理内存。在需要的时候,再把这块空间的数据从磁盘中读回来。这就是操作系统的虚拟内存机制。
当然,也存在没有操作系统的情况,这个时候你的程序所使用的内存就是物理内存,我们必须自己做好内存的管理。
那么从程序角度来说,我们应该怎样使用内存呢?
本质上来说,你想怎么用就怎么用,并没有什么特别的限制。一个编译器的作者,可以决定在哪儿放代码,在哪儿放数据。当然了,别的作者也可能采用其他的策略。比如,C 语言和 Java 虚拟机对内存的管理和使用策略就是不同的。
不过尽管如此,大多数语言还是会采用一些通用的内存管理模式。以 C 语言为例,会把内存划分为代码区、静态数据区、栈和堆,如下所示。

图 5:C 语言的内存布局方式
其中,代码区(也叫做文本段),主要存放编译完成后的机器码,也就是 CPU 指令;静态数据区会保存程序中的全局变量和常量。这些内存是静态的、固定大小的,在编译完毕以后就能确定清楚所占用空间的大小、代码区每个函数的地址,以及静态数据区每个变量和常量的地址。这些内存在程序运行期间会一直被占用。
而堆和栈,属于程序动态、按需获取的内存。我来和你分析下这两种内存。
我们先看看栈(Stack)。使用栈的一个好处是,操作系统会根据程序使用内存的需求,自动地增加或减少栈的空间。通常来说,操作系统会用一个寄存器保存栈顶的地址,程序可以修改这个寄存器的值,来获取或者释放空间。有的 CPU,还有专门的指令来管理栈,比如 x86 架构,会使用 push 和 pop 指令,把数据写入栈或弹出栈,并自动修改栈顶指针。
在程序里使用栈的场景是这样的,程序的运行可以看做是在逐级调用函数(或者叫过程)。像下面的示例程序,存在着 main->bar->foo 的调用结构,这也就是控制流转移的过程。
int main(){
int a = 1;
foo(3);
bar();
}
int foo(int c){
int b = 2;
return b+c;
}
int bar(){
return foo(4) + 1;
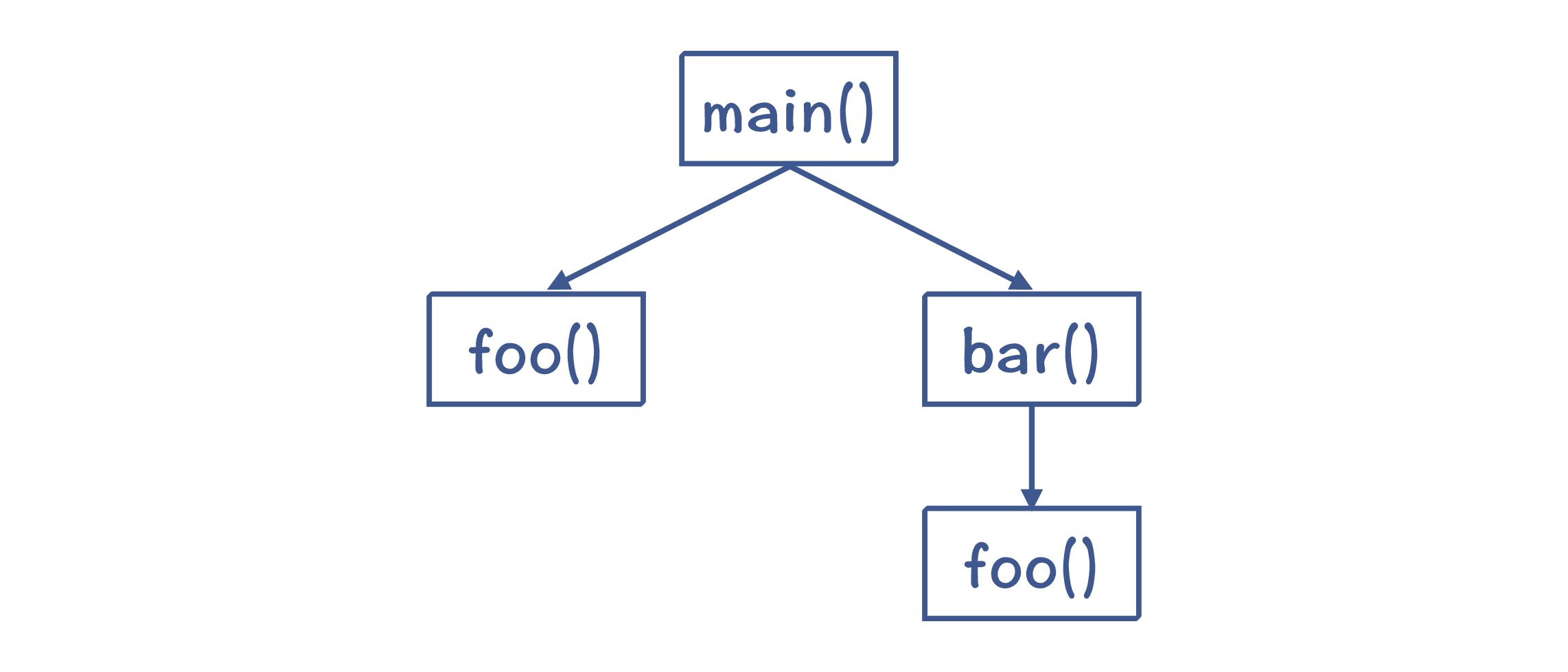
图 6:程序逐级调用的过程
每次调用函数的过程中,都需要一些空间来保存一些信息,比如参数、需要保护的寄存器的值、返回地址、本地变量等,这些信息叫做这个过程的活动记录(Activation Record)。
**注意,活动记录是个逻辑概念。**在物理实现上,一些信息可以保存在寄存器里,使得性能更高。比如说依据一些约定,返回值和少于 6 个的参数,是通过寄存器传递的。这里所说的“依据约定”,是指在调用一个函数时,如何传递参数、如何设定返回地址、如何获取返回值的这种约定,我们把它称之为 ABI(Application Binary Interface,应用程序二进制接口)。利用 ABI,使得我们可以用一种语言写的程序,去调用另外的语言写的程序。
另一些信息会保存在栈里。每个函数(或过程)在栈里保存的信息,叫做栈帧(Stack Frame)。我们可以自由设计栈帧的结构,比如,下图就是一种常见的设计:

图 7:一种可能的栈帧结构
- **返回值:**一般放在最顶上,这样它的地址是固定的。foo 函数返回以后,它的调用者可以到这里来取到返回值。在实际情况中,ABI 会规定优先通过寄存器来传递返回值,比通过内存传递性能更高。
- **参数:**在调用 foo 函数时,我们把它所需要一个整型参数写到栈帧的这个位置。同样,我们也可以通过寄存器来传递参数,而不是通过内存。
- **控制链接:**就是上一级栈帧(也就是 main 函数的栈帧)的地址。如果该函数用到了上一级作用域中的变量,那么就可以顺着这个链接找到上一级作用域的栈帧,并找到变量的值。
- 返回地址: foo 函数执行完毕以后,继续执行哪条指令。同样,我们可以用寄存器来保存这个信息。
- 本地变量: foo 函数的本地变量 b 的存储空间。
- **寄存器信息:**我们还经常在栈帧里保存寄存器的数据。如果在 foo 函数里要使用某个寄存器,可能需要先把它的值保存下来,防止破坏了别的代码保存在这里的数据。**这种约定叫做被调用者责任,**也就是使用寄存器的函数要保护好寄存器里原有的信息。某个函数如果使用了某个寄存器,但它又要调用别的函数,为了防止别的函数把自己放在寄存器中的数据覆盖掉,这个函数就要自己把寄存器信息保存在栈帧中。这种约定叫做调用者责任。
对于示例程序,在多级调用以后,栈里的信息可能是下面这个样子。如果你想看到这个信息,通常可以在调试程序的时候打印出来。

图 8:一个运行中的栈的示例
理解了栈的机制以后,我们再来看看动态获取内存的第二种方式:堆(Heap)。
操作系统一般会提供一个 API,供应用申请内存。当应用程序用完之后,要通过另一个 API 释放。如果忘记释放,就会造成内存越用越少,这叫做内存泄漏。
相对于栈来说,这是堆的一个缺点。不过,相应的好处是,**应用在堆里申请的对象的生存期,可以由自己控制,不会像栈里的内存那样,在退出作用域之后就被自动收回。**所以,如果数据的生存期超过了创建它的作用域的生存期,就必须在堆中申请内存。
扩展:反之,如果数据的生存期跟创建它的作用域一致的话,那么在栈里和堆里申请都是可以的。当然,肯定在栈里申请更划算。所以,编译优化中的逃逸分析,本质就是分析出哪些对象的生存期是跟函数或方法的生存期一致的,那么就不需要到堆里申请了。
另外,在并发的场景下,由于栈是线程独享的,而堆是多个线程共享的,所以在堆里申请内存的效率会更低,因为需要在多个线程之间同步,避免出现竞争。
那为了避免内存泄漏,在设计一门语言的时候,通常需要提供内存管理的方案。
一种方案是像 C 和 C++ 那样,由程序员自己负责内存的释放,这对程序员的要求就比较高。另一种方案是,像 Java 语言那样自动地管理内存,这个特性也叫做垃圾收集。垃圾收集是语言的运行时功能,能够通过一定的算法来回收不用的内存。
总结起来,在计算机上运行一个程序,我们需要跟两个硬件打交道:一个是 CPU,它能够从内存中读取指令并顺序执行;第二个硬件是内存,内存使用模式有栈和堆两种方式,两种方式有各自的优点和适用场景。
运行时系统
除了硬件支撑,程序的运行还需要软件,这些软件叫做运行时系统(Runtime System),或者叫运行时(Runtime)。前面我们提到的垃圾收集器,就是一个运行时的软件。进行并发调度的软件,也是运行时的组成部分。
实际上,对于把源代码编译成机器码在操作系统上运行的语言来说(比如 C、C++),操作系统本身就可以看做是它们的运行时系统。它可以帮助程序调度 CPU 资源、内存资源,以及其他一些资源,如 IO 端口。
但也有很多语言,比如 Java、Python、Erlang 和 Lua 等,它们不是直接在操作系统上运行的,而是运行在虚拟机上。那么它们的执行模式有什么特点?对编译有什么影响呢?
在虚拟机上运行
虚拟机是计算机语言的一种运行时系统。虚拟机上运行的是中间代码,而不是 CPU 可以直接认识的指令。
虚拟机有两种模型:一种叫做栈机(Stack Machine),一种叫做寄存器机(Register Machine)。它们的区别,主要在于如何获取指令的操作数。
栈机是从栈里获取,而寄存器机是从寄存器里获取。这两种虚拟机各有优缺点。
基于栈的虚拟机
首先说说栈机。JVM 和 Python 中的解释器,都采用了栈机的模型。在本讲中,我主要介绍 Java 的虚拟机的运行机制。
JVM 中,每一个线程都有一个 JVM 栈,每次调用一个方法都会生成一个栈帧,来支持这个方法的运行。这跟 C 语言很相似。但 JVM 的栈帧比 C 语言的复杂,它包含了一个本地变量数组(包括方法的参数和本地变量)、操作数栈、到运行时常量池的引用等信息。
对比 JVM 的栈帧和 C 语言栈帧的设计,你应该得到一些启示:栈帧的结构是语言的作者可以自己设计的,没有什么死规定。所以我们学知识也不要学死了,以为栈帧只有一种结构。
注意,我们这里提到了两个栈,一个是类似于 C 语言的栈的方法栈,另一个是方法栈里每个栈帧中的操作数栈。而我们说的栈机中的“栈”,指的是这个操作数栈,不要弄混了。

图 9:JVM 中一个栈帧的结构
对于每个指令,解释器先要把它的操作数压到栈里。在执行指令时,从栈里弹出操作数,计算完毕以后,再把结果压回栈里。
以“2+3*5”为例,它对应的栈机的代码如下:
push 2 //把操作数 2 入栈
push 3 //把操作数 3 入栈
push 5 //把操作数 5 入栈,栈里目前是 2、3、5
imul //弹出 5 和 3,执行整数乘法运算,得到 15,然后把结果入栈,现在栈里是 2、15
iadd //弹出 15 和 2,执行整数加法运算,得到 17,然后把结果入栈,最后栈里是 17
提示:对于不同大小的常量操作数,实际上生成的指令会不同。这里只是示意。
注意一点,要从 AST 生成上面的代码,你只需要对 AST 做深度优先的遍历即可。先后经过的节点是:2->3->5->*->+(注:这种把操作符放在后面的写法,叫做逆波兰表达式,也叫后缀表达式)。
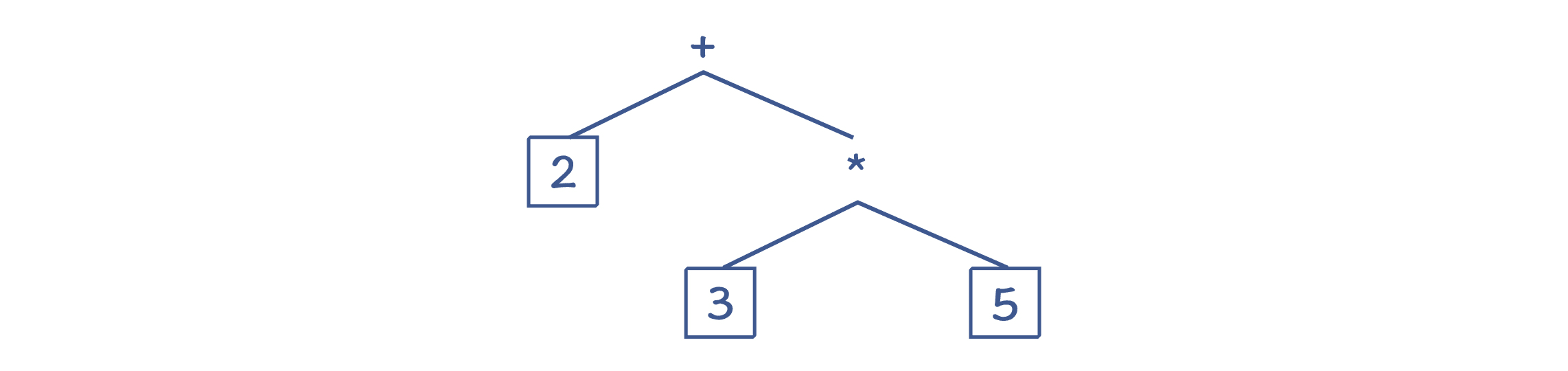
图 10:2+3*5 对应的 AST
生成上述栈机代码,只需要深度优先地遍历 AST,并且只需要进行两种操作:
- 在遇到字面量或者变量的时候,生成 push 指令;
- 在遇到操作符的时候,生成相应的操作指令即可。
你能看出,这个算法相当简单,这也是栈机最大的优点。
你还会注意到,像 imul 和 iadd 这样的指令,不需要带操作数,因为指令所需的操作数就在栈顶。这是栈机的指令跟汇编语言的指令的最大区别。
注意:imul 和 iadd 中的 i,代表这两个指令是对整型值做操作。对浮点型、长整型等不同类型,分别对应不同的指令前缀。
好了,现在你已经了解了栈机的原理。基于对栈机的认知,你再去阅读 Java 和 Python 的字节码,就会更加容易了。而关于 Python 的虚拟机,我还会在后续课程中详细展开。
基于寄存器的虚拟机
除了栈机之外,另一种虚拟机是寄存器机。寄存器机使用寄存器名称来表示操作数,所以它的指令也跟汇编代码相似,像 add 这样的操作码后面要跟操作数。
在实践中,早期版本的安卓系统中,用于解释执行代码的 Dalvik 虚拟机,就采用了寄存器模式,而 Erlang 和 Lua 语言的虚拟机也是寄存器机。JavaScript 引擎 V8 的比较新的版本中,也引入了一个解释器 Ignition,它也是个寄存器机。
与栈机相比,利用寄存器机编译所生成的代码更少,因为省去了很多 push 指令。
不过,寄存器机所指的寄存器,不一定是真正的物理寄存器,有可能只是栈帧中的一个位置。当然,有的寄存器机在实现的时候,确实会用到物理寄存器,从而提高计算性能。我们在后面研究 V8 的 Ignition 解释器时,会看到这种实现。
课程小结
本讲我带你了解了代码是如何被运行的,以及是在什么样的环境中运行的。这样,你才会知道如何让编译器生成正确的代码。
现有的程序有两大类执行模式。一类是编译成本地代码(机器码),运行在物理机和操作系统上,这时候你需要掌握目标机器的汇编代码,知道指令是如何跟 CPU 和内存打交道的,也需要知道操作系统在其中扮演了什么角色。另一大类是在虚拟机上运行的,虚拟机又分为栈机和寄存器机两大类,你需要明确它们之间的区别,才能知道为什么它们的 IR 是不同的,又分别有什么优缺点。
不过,现代程序的运行环境往往比较复杂。像 Java 等语言,既可以解释执行字节码,又能够即时编译成本地代码运行,所以它们的运行时机制就更复杂一些。你要综合两种运行时机制的知识,才能完整地理解 JVM。
一课一思
我们现在已经知道,栈是一种自动管理内存的机制,你只要修改栈顶指针,就可以获得所需的内存。那么,你能否结合操作系统的知识,研究一下这个过程是如何实现的呢?
欢迎在留言区分享你的答案,如果这节课对你有帮助,也欢迎你把它分享给你的朋友。
参考资料
1. 关于 JVM 栈帧的结构,可以参考JVM Specification。
2. 关于 Java 字节码的指令集,可以参考Java Language Specification。
文章作者 anonymous
上次更新 2024-04-06