12|进程内协同:同步、互斥与通讯
文章目录
你好,我是七牛云许式伟。
上一节开始我们进入了多任务的世界,我们详细介绍了三类执行体:进程、线程和协程,并且介绍了每一种执行体的特点。
既然启动了多个执行体,它们就需要相互协同,今天我们先讨论进程内的执行体协同。
考虑到进程内的执行体有两类:用户态的协程(以 Go 语言的 goroutine 为代表)、操作系统的线程,我们对这两类执行体的协同机制做个概要。如下:
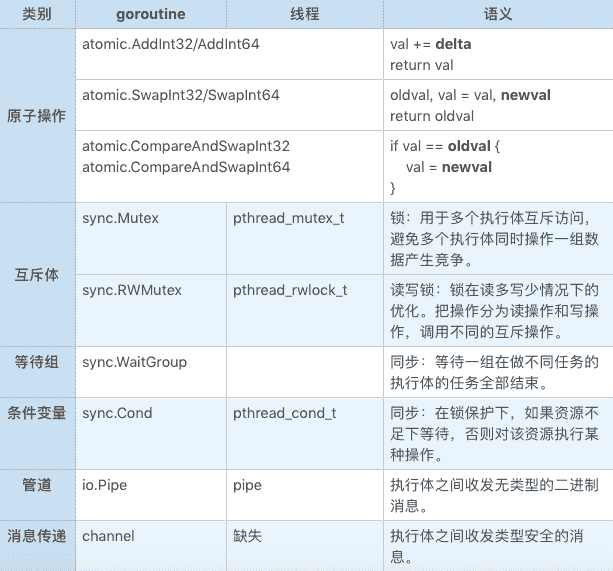
让我们逐一详细分析一下它们。
原子操作
首先让我们看一下原子操作。需要注意的是,原子操作是 CPU 提供的能力,与操作系统无关。这里列上只是为了让你能够看到进程内通讯的全貌。
顾名思义,原子操作的每一个操作都是原子的,不会中途被人打断,这个原子性是 CPU 保证的,与执行体的种类无关,无论 goroutine 还是操作系统线程都适用。
从语义上来说,原子操作可以用互斥体来实现,只不过原子操作要快得多。
例如:
|
|
等价于:
|
|
执行体的互斥
互斥体也叫锁。锁用于多个执行体之间的互斥访问,避免多个执行体同时操作一组数据产生竞争。其使用界面上大概是这样的:
|
|
锁的使用范式比较简单:在操作需要互斥的数据前,先调用 Lock,操作完成后就调用 Unlock。但总是存在一些不求甚解的人,对锁存在各种误解。
有的人会说锁很慢。甚至我曾看到有 Go 程序员用 channel 来模拟锁,理由就是锁太慢了,尽量不要用锁。产生“锁慢,channel 快”这种错觉的一个原因,可能是人们经常看到这样的忠告:
不要通过共享内存(锁)来通信,要通过通信(channel)来共享内存。
不明就里的人们看到这话后,可能就有了这样的印象:锁是坏的,锁是性能杀手,channel 是好的,是 Go 发明的先进武器,应该尽可能用 channel,而不要用锁。
快慢是相对而言的。锁的确会导致代码串行执行,所以在某段代码并发度非常高的情况下,串行执行的确会导致性能的显著降低。但平心而论,相比其他的进程内通讯的原语来说,锁并不慢。从进程内通讯来说,比锁快的东西,只有原子操作。
例如 channel,作为进程内执行体间传递数据的设施来说,它本身是共享变量,所以 channel 的每个操作必然是有锁的。事实上,channel 的每个操作都比较耗时。关于这一点,在下文解释 channel 背后的工作机理后,你就会清楚知道。
那么锁的问题在哪里?锁的最大问题在于不容易控制。锁 Lock 了但是忘记 Unlock 后是灾难性的,因为相当于服务器挂了,所有和该锁相关的代码都不能被执行。
比如:
|
|
在考虑异常的情况下,这段代码是不安全的,如果 doSth 抛出了异常,那么服务器就会出现问题。
为此 Go 语言还专门发明了一个 defer 语法来保证配对:
|
|
这样可以保证即使 doSth 发生异常,mutex.Unlock 仍然会被正确地执行。这类在异常情况下也能够正常工作的代码,我们称之为“对异常安全的代码”。如果语言不支持 defer,而是支持 try … catch,那么代码可能是这样的:
|
|
锁不容易控制的另一个表现是锁粒度的问题。例如上面 doSth 函数里面如果调用了网络 IO 请求,而网络 IO 请求在少数特殊情况下可能会出现慢请求,要好几秒才返回。那么这几秒对服务器来说就好像挂了,无法处理请求。
对服务器来说这是极为致命的。对后端程序员来说,有一句箴言要牢记:
不要在锁里面执行费时操作。
这里“锁里面”是指在mutex.Lock和mutex.Unlock之间的代码。
在锁的最佳编程实践中,如果明确一组数据的并发访问符合“绝大部分情况下是读操作,少量情况有写操作” ,这种“读多写少”特征,那么应该用读写锁。
所谓读写锁,是把锁里面的操作分为读操作和写操作两种,对应调用不同的互斥操作。
如果是读操作,代码如下:
|
|
如果是锁里面是写操作,代码就和普通锁一样,如下:
|
|
为什么在“读多写少”的情况下,这样的使用范式能够优化性能?
因为从需求上来说,如果当前我们正在执行某个读操作,那么再来一个新的读操作,是不应该挡在外面的,大家都不修改数据,可以安全地并发执行。但如果来的是写操作,就应该挡在外面,等待读操作执行完。整体来说,读写锁的特性就是:
读操作不阻止读操作,阻止写操作;
写操作阻止一切,不管读操作还是写操作。
执行体的同步
聊完了执行体的互斥,我们再来看下执行体之间的同步。
同步的一个最常见的场景是:把一个大任务分解为 n 个小任务,分配给 n 个执行体并行去做,等待它们一起做完。这种同步机制我们叫“等待组”。
其使用界面上大概是这样的:
|
|
用法上大概是这样的:
|
|
简而言之,在每个任务开始的时候调用 wg.Add(1),结束的时候调用 wg.Done(),然后在主执行体调用 wg.Wait() 等待这些任务结束。
需要注意的是,wg.Add(1) 是要在任务的 goroutine 还没有开始就先调用,否则可能出现某个任务还没有开始执行就被认为结束了。
条件变量(Condition Variable)是一个更通用的同步原语,设计精巧又极为强大。强大到什么程度?像 channel 这样的通讯机制都可以用它来实现。
条件变量的使用界面上大概是这样的:
|
|
那么,怎么用条件变量?
我们先看下初始化。条件变量初始化的时候需要传入一个互斥体,它可以是普通锁(Mutex),也可以是读写锁(RWMutex)。如下:
|
|
为什么创建条件变量需要传入锁?因为 cond.Wait() 的需要。Wait 内部实现逻辑是:
|
|
初始化了条件变量后,我们再来看看它的使用方式。条件变量的用法有一个标准化的模板,看起来大概是这样的:
|
|
看起来有些复杂,让我们来解释一下。加锁后,先用一个 for 循环判断当前是否能够做我们想做的事情,如果做不了就调用 cond.Wait() 进行等待。
这里很重要的一个细节是注意用的是 for 循环,而不是 if 语句。这是因为 cond.Wait() 得到了执行权后不代表我们想做的事情就一定能够干了,所以要再重新判断一次条件是否满足。
确定能够做事情了,于是 doSomething。在做的过程中间,如果我们判断可能挂起队列中的部分执行体满足了重新执行的条件,就用 cond.Broadcast 或 cond.Signal 唤醒它们。
cond.Broadcast 比较粗暴,它唤醒了所有在这个条件变量挂起的执行体,而 cond.Signal 则只唤醒其中的一个。
什么情况下应该用 cond.Broadcast,什么情况下应该用 cond.Signal?最偷懒的方式当然是不管三七二十一,用 cond.Broadcast 一定没问题。但是本着经济的角度,我们还是要交代清楚 cond.Signal 的适用范围:
- 挂起在这个条件变量上的执行体,它们等待的条件是一致的;
- 本次 doSomething 操作完成后,所释放的资源只够一个执行体来做事情。
Cond 原语虽然叫条件变量,但是实际上它既没有明白说变量具体是什么样的,也没有说条件具体是什么样的。变量是指“一组要在多个执行体之间协同的数据”。条件是指做任务前 Wait 的“前置条件”,和做任务时需要唤醒其它人的“唤醒条件”。
这样的介绍相当的抽象。我们拿 Go 语言的 channel 开刀,自己实现一个。代码如下:
|
|
对着这个 Channel 的实现,你是否对条件变量有感觉很多?顺便提醒一点,这个 Channel 的实现不支持无缓冲 channel,也就是不支持 NewChannel(0) 的情况。如果你感兴趣,可以改改这个问题。
执行体的通讯
聊完同步与互斥,我们接着聊执行体的通讯:怎么在执行体间收发消息。
管道是大家都很熟知的执行体间的通讯机制。规格如下:
|
|
用法上,先调用pr, pw := io.Pipe()得到管道的写入端和读出端,分别传给两个并行执行的 goroutine(其他语言也类似),然后一个 goroutine 读,一个 goroutine 写就好了。
管道用处很多。一个比较常见的用法是做读写转换,例如,假设我手头有一个算法:
|
|
这个算法生成的数据流,需要作为另一个函数的输入,但是这个函数的输入是 io.Reader,原型如下:
|
|
那么怎么把它们串起来呢?用管道我们很容易实现这样的变换:
|
|
这个 FooReader 函数几句话就把 Foo 变成了一个符合 io.Reader 接口的对象,它就可以很方便的和 Bar 函数结合了。
其实 Go 语言中引入的 channel 也是管道,只不过它是类型安全的管道。具体用法如下:
|
|
我们后面在“服务端开发”一章,我们还会比较详细讨论 channel,今天先了解一个大体的语义。
结语
总结一下,我们今天主要聊了执行体间的协同机制:原子操作、同步、互斥与通讯。我们重点聊了锁和同步原语“条件变量”。
锁在一些人心中是有误解的,但实际上锁在服务端编程中的比重并不低,我们可能经常需要和它打交道,建议多花精力理解它们。
条件变量是最复杂的同步原语,功能强大。虽然平常我们直接使用条件变量的机会不是太多,大部分常见的场景往往有更高阶的原语(例如 channel)可以取代。但是它的设计精巧而高效,值得细细体会。
你会发现,操作系统课本上的信号量这样的同步原语,我们这里没有交代,这是因为它被更强大而且性能更好的同步原语“条件变量”所取代了。
上面我们为了介绍条件变量的用法,我们实作了一个 channel,你也可以考虑用信号量这样的东西来实现一遍,然后分析一下为什么我们说基于“条件变量”的版本是更优的。
如果你对今天的内容有什么思考与解读,欢迎给我留言,我们一起讨论。在下期,我们将讨论进程与进程之间的协同:进程间的同步互斥、资源共享与通讯。
如果你觉得有所收获,也欢迎把文章分享给你的朋友。感谢你的收听,我们下期再见。
文章作者 anonymous
上次更新 2024-01-15