04|索引(上):改进的二分查找算法在Kafka索引的应用
文章目录
你好,我是胡夕。今天,我来带你学习一下 Kafka 源码中的索引对象,以及改进版二分查找算法(Binary Search Algorithm)在索引中的应用。
为什么要阅读索引源码?
坦率地说,你在 Kafka 中直接接触索引或索引文件的场景可能不是很多。索引是一个很神秘的组件,Kafka 官方文档也没有怎么提过它。你可能会说,既然这样,我还有必要读索引对象的源码吗?其实是非常有必要的!我给你分享一个真实的例子。
有一次,我用 Kafka 的 DumpLogSegments 类去查看底层日志文件和索引文件的内容时,发现了一个奇怪的现象——查看日志文件的内容不需要 sudo 权限,而查看索引文件的内容必须要有 sudo 权限,如下所示:
$ sudo ./kafka-run-class.sh kafka.tools.DumpLogSegments –files ./00000000000000000000.index
Dumping 00000000000000000000.index
offset: 0 position: 0
$ ./kafka-run-class.sh kafka.tools.DumpLogSegments --files 00000000000000000000.index
Dumping 00000000000000000000.index
Exception in thread "main" java.io.FileNotFoundException: 00000000000000000000.index (Permission denied)
......
看了索引源码之后,我才知道,原来 Kafka 读取索引文件时使用的打开方式是 rw。实际上,读取文件不需要 w 权限,只要 r 权限就行了。这显然是 Kafka 的一个 Bug。你看,通过阅读源码,我找到了问题的根本原因,还顺便修复了 Kafka 的一个问题(KAFKA-5104)。
除了能帮我们解决实际问题之外,索引这个组件的源码还有一个亮点,那就是它应用了耳熟能详的二分查找算法来快速定位索引项。关于算法,我一直觉得很遗憾的是,我们平时太注重算法本身,却忽略了它们在实际场景中的应用。
比如说,我们学习了太多的排序算法,但是,对于普通的应用开发人员来说,亲自使用这些算法完成编程任务的机会实在太少了。说起数组排序,你可能只记得调用 Collections.sort 方法了,但它底层应用了什么排序算法,其实并不清楚。
难得的是,Kafka 的索引组件中应用了二分查找算法,而且社区还针对 Kafka 自身的特点对其进行了改良。这难道不值得我们好好学上一学吗?!话不多说,现在我们就开始学习吧。
索引类图及源文件组织架构
在 Kafka 源码中,跟索引相关的源码文件有 5 个,它们都位于 core 包的 /src/main/scala/kafka/log 路径下。我们一一来看下。
- AbstractIndex.scala:它定义了最顶层的抽象类,这个类封装了所有索引类型的公共操作。
- LazyIndex.scala:它定义了 AbstractIndex 上的一个包装类,实现索引项延迟加载。这个类主要是为了提高性能。
- OffsetIndex.scala:定义位移索引,保存“< 位移值,文件磁盘物理位置 >”对。
- TimeIndex.scala:定义时间戳索引,保存“< 时间戳,位移值 >”对。
- TransactionIndex.scala:定义事务索引,为已中止事务(Aborted Transcation)保存重要的元数据信息。只有启用 Kafka 事务后,这个索引才有可能出现。
这些类的关系如下图所示:
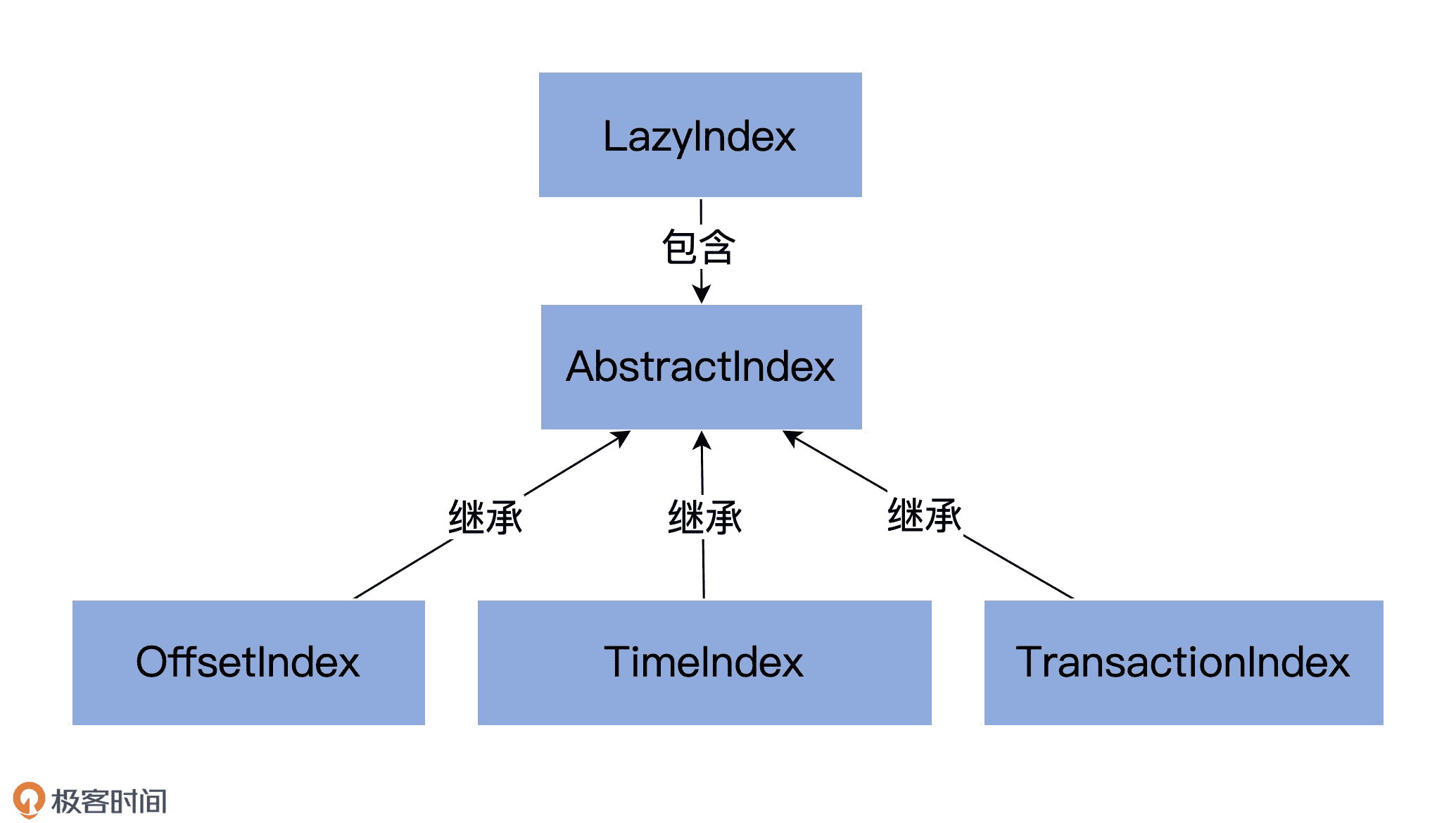
其中,OffsetIndex、TimeIndex 和 TransactionIndex 都继承了 AbstractIndex 类,而上层的 LazyIndex 仅仅是包装了一个 AbstractIndex 的实现类,用于延迟加载。就像我之前说的,LazyIndex 的作用是为了提升性能,并没有什么功能上的改进。
所以今天,我先和你讲一讲 AbstractIndex 这个抽象父类的代码。下节课,我再重点和你分享具体的索引实现类。
AbstractIndex 代码结构
我们先来看下 AbstractIndex 的类定义:
abstract class AbstractIndex(@volatile var file: File, val baseOffset: Long, val maxIndexSize: Int = -1, val writable: Boolean) extends Closeable {
……
}
AbstractIndex 定义了 4 个属性字段。由于是一个抽象基类,它的所有子类自动地继承了这 4 个字段。也就是说,Kafka 所有类型的索引对象都定义了这些属性。我先给你解释下这些属性的含义。
- 索引文件(file)。每个索引对象在磁盘上都对应了一个索引文件。你可能注意到了,这个字段是 var 型,说明它是可以被修改的。难道索引对象还能动态更换底层的索引文件吗?是的。自 1.1.0 版本之后,Kafka 允许迁移底层的日志路径,所以,索引文件自然要是可以更换的。
- 起始位移值(baseOffset)。索引对象对应日志段对象的起始位移值。举个例子,如果你查看 Kafka 日志路径的话,就会发现,日志文件和索引文件都是成组出现的。比如说,如果日志文件是 00000000000000000123.log,正常情况下,一定还有一组索引文件 00000000000000000123.index、00000000000000000123.timeindex 等。这里的“123”就是这组文件的起始位移值,也就是 baseOffset 值。
- 索引文件最大字节数(maxIndexSize)。它控制索引文件的最大长度。Kafka 源码传入该参数的值是 Broker 端参数 segment.index.bytes 的值,即 10MB。这就是在默认情况下,所有 Kafka 索引文件大小都是 10MB 的原因。
- 索引文件打开方式(writable)。“True”表示以“读写”方式打开,“False”表示以“只读”方式打开。如果我没记错的话,这个参数应该是我加上去的,就是为了修复我刚刚提到的那个 Bug。
AbstractIndex 是抽象的索引对象类。可以说,它是承载索引项的容器,而每个继承它的子类负责定义具体的索引项结构。比如,OffsetIndex 的索引项是 < 位移值,物理磁盘位置 > 对,TimeIndex 的索引项是 < 时间戳,位移值 > 对。基于这样的设计理念,AbstractIndex 类中定义了一个抽象方法 entrySize 来表示不同索引项的大小,如下所示:
protected def entrySize: Int
子类实现该方法时需要给定自己索引项的大小,对于 OffsetIndex 而言,该值就是 8;对于 TimeIndex 而言,该值是 12,如下所示:
// OffsetIndex
override def entrySize = 8
// TimeIndex
override def entrySize = 12
说到这儿,你肯定会问,为什么是 8 和 12 呢?我来解释一下。
在 OffsetIndex 中,位移值用 4 个字节来表示,物理磁盘位置也用 4 个字节来表示,所以总共是 8 个字节。你可能会说,位移值不是长整型吗,应该是 8 个字节才对啊。
还记得 AbstractIndex 已经保存了 baseOffset 了吗?这里的位移值,实际上是相对于 baseOffset 的相对位移值,即真实位移值减去 baseOffset 的值。下节课我会给你重点讲一下它,这里你只需要知道使用相对位移值能够有效地节省磁盘空间就行了。而 Broker 端参数 log.segment.bytes 是整型,这说明,Kafka 中每个日志段文件的大小不会超过 2^32,即 4GB,这就说明同一个日志段文件上的位移值减去 baseOffset 的差值一定在整数范围内。因此,源码只需要 4 个字节保存就行了。
同理,TimeIndex 中的时间戳类型是长整型,占用 8 个字节,位移依然使用相对位移值,占用 4 个字节,因此总共需要 12 个字节。
如果有人问你,Kafka 中的索引底层的实现原理是什么?你可以大声地告诉他:内存映射文件,即 Java 中的 MappedByteBuffer。
使用内存映射文件的主要优势在于,它有很高的 I/O 性能,特别是对于索引这样的小文件来说,由于文件内存被直接映射到一段虚拟内存上,访问内存映射文件的速度要快于普通的读写文件速度。
另外,在很多操作系统中(比如 Linux),这段映射的内存区域实际上就是内核的页缓存(Page Cache)。这就意味着,里面的数据不需要重复拷贝到用户态空间,避免了很多不必要的时间、空间消耗。
在 AbstractIndex 中,这个 MappedByteBuffer 就是名为 mmap 的变量。接下来,我用注释的方式,带你深入了解下这个 mmap 的主要流程。
@volatile
protected var mmap: MappedByteBuffer = {
// 第 1 步:创建索引文件
val newlyCreated = file.createNewFile()
// 第 2 步:以 writable 指定的方式(读写方式或只读方式)打开索引文件
val raf = if (writable) new RandomAccessFile(file, “rw”) else new RandomAccessFile(file, “r”)
try {
if(newlyCreated) {
if(maxIndexSize < entrySize) // 预设的索引文件大小不能太小,如果连一个索引项都保存不了,直接抛出异常
throw new IllegalArgumentException(“Invalid max index size: " + maxIndexSize)
// 第 3 步:设置索引文件长度,roundDownToExactMultiple 计算的是不超过 maxIndexSize 的最大整数倍 entrySize
// 比如 maxIndexSize=1234567,entrySize=8,那么调整后的文件长度为 1234560
raf.setLength(roundDownToExactMultiple(maxIndexSize, entrySize))
}
// 第 4 步:更新索引长度字段_length
_length = raf.length()
// 第 5 步:创建 MappedByteBuffer 对象
val idx = {
if (writable)
raf.getChannel.map(FileChannel.MapMode.READ_WRITE, 0, _length)
else
raf.getChannel.map(FileChannel.MapMode.READ_ONLY, 0, _length)
}
/* set the position in the index for the next entry */
// 第 6 步:如果是新创建的索引文件,将 MappedByteBuffer 对象的当前位置置成 0
// 如果索引文件已存在,将 MappedByteBuffer 对象的当前位置设置成最后一个索引项所在的位置
if(newlyCreated)
idx.position(0)
else
idx.position(roundDownToExactMultiple(idx.limit(), entrySize))
// 第 7 步:返回创建的 MappedByteBuffer 对象
idx
} finally {
CoreUtils.swallow(raf.close(), AbstractIndex) // 关闭打开索引文件句柄
}
}
这些代码最主要的作用就是创建 mmap 对象。要知道,AbstractIndex 其他大部分的操作都是和 mmap 相关。
我举两个简单的小例子。
例 1:如果我们要计算索引对象中当前有多少个索引项,那么只需要执行下列计算即可:
protected var _entries: Int = mmap.position() / entrySize
例 2:如果我们要计算索引文件最多能容纳多少个索引项,只要定义下面的变量就行了:
private[this] var _maxEntries: Int = mmap.limit() / entrySize
再进一步,有了这两个变量,我们就能够很容易地编写一个方法,来判断当前索引文件是否已经写满:
def isFull: Boolean = _entries >= _maxEntries
总之,AbstractIndex 中最重要的就是这个 mmap 变量了。事实上,AbstractIndex 继承类实现添加索引项的主要逻辑,也就是向 mmap 中添加对应的字段。
写入索引项
下面这段代码是 OffsetIndex 的 append 方法,用于向索引文件中写入新索引项。
def append(offset: Long, position: Int): Unit = {
inLock(lock) {
// 第 1 步:判断索引文件未写满
require(!isFull, “Attempt to append to a full index (size = " + _entries + “).”)
// 第 2 步:必须满足以下条件之一才允许写入索引项:
// 条件 1:当前索引文件为空
// 条件 2:要写入的位移大于当前所有已写入的索引项的位移——Kafka 规定索引项中的位移值必须是单调增加的
if (_entries == 0 || offset > _lastOffset) {
trace(s"Adding index entry $offset => $position to ${file.getAbsolutePath}”)
mmap.putInt(relativeOffset(offset)) // 第 3 步 A:向 mmap 中写入相对位移值
mmap.putInt(position) // 第 3 步 B:向 mmap 中写入物理位置信息
// 第 4 步:更新其他元数据统计信息,如当前索引项计数器_entries 和当前索引项最新位移值_lastOffset
_entries += 1
_lastOffset = offset
// 第 5 步:执行校验。写入的索引项格式必须符合要求,即索引项个数*单个索引项占用字节数匹配当前文件物理大小,否则说明文件已损坏
require(_entries * entrySize == mmap.position(), entries + " entries but file position in index is " + mmap.position() + “.”)
} else {
// 如果第 2 步中两个条件都不满足,不能执行写入索引项操作,抛出异常
throw new InvalidOffsetException(s"Attempt to append an offset ($offset) to position $entries no larger than” +
s" the last offset appended (${_lastOffset}) to ${file.getAbsolutePath}.")
}
}
}
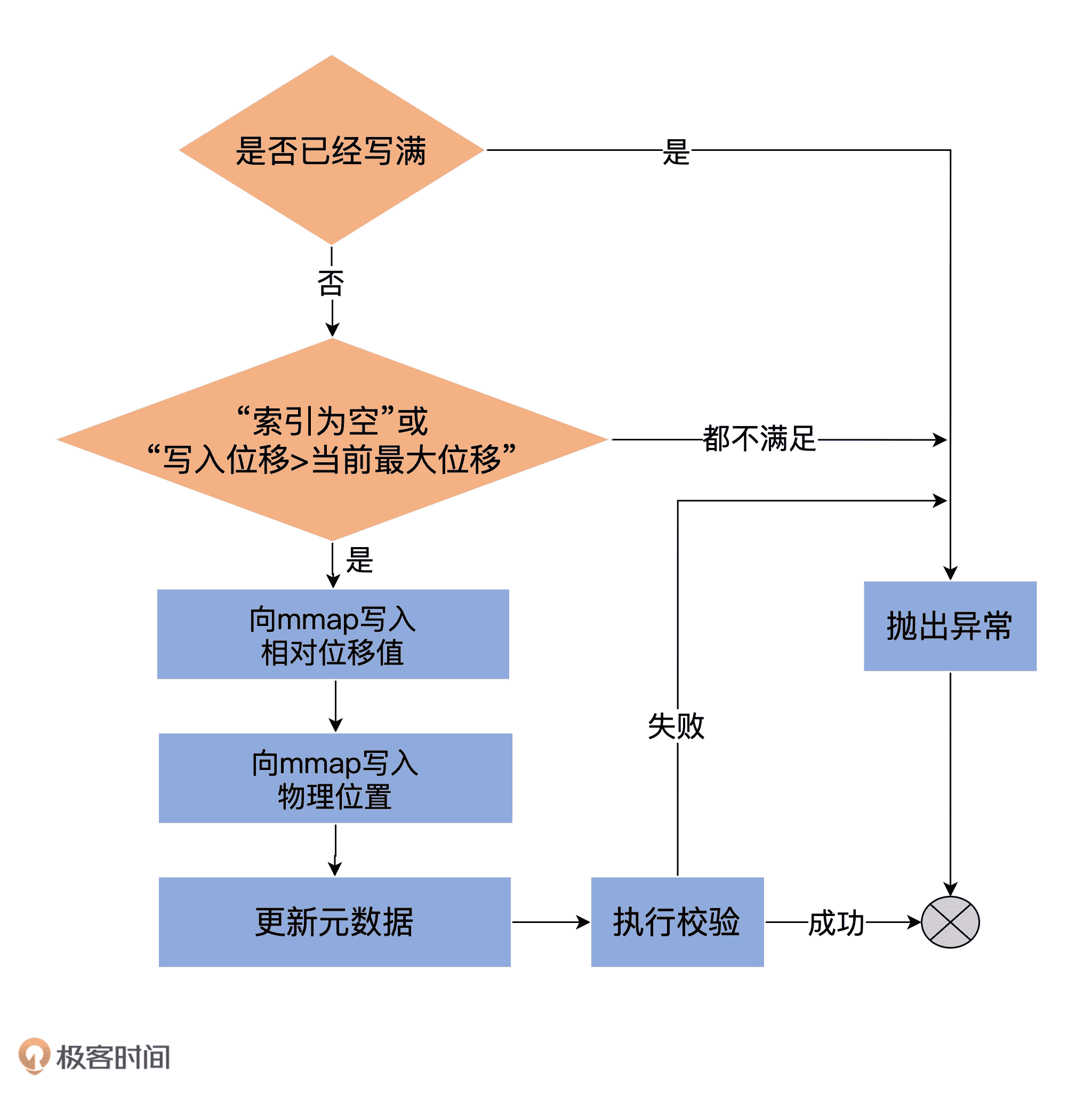
我使用一张图来总结下 append 方法的执行流程,希望可以帮你更快速地掌握它的实现:
查找索引项
索引项的写入逻辑并不复杂,难点在于如何查找索引项。AbstractIndex 定义了抽象方法 parseEntry 用于查找给定的索引项,如下所示:
protected def parseEntry(buffer: ByteBuffer, n: Int): IndexEntry
这里的“n”表示要查找给定 ByteBuffer 中保存的第 n 个索引项(在 Kafka 中也称第 n 个槽)。IndexEntry 是源码定义的一个接口,里面有两个方法:indexKey 和 indexValue,分别返回不同类型索引的 <Key,Value> 对。
OffsetIndex 实现 parseEntry 的逻辑如下:
override protected def parseEntry(buffer: ByteBuffer, n: Int): OffsetPosition = {
OffsetPosition(baseOffset + relativeOffset(buffer, n), physical(buffer, n))
}
OffsetPosition 是实现 IndexEntry 的实现类,Key 就是之前说的位移值,而 Value 就是物理磁盘位置值。所以,这里你能看到代码调用了 relativeOffset(buffer, n) + baseOffset 计算出绝对位移值,之后调用 physical(buffer, n) 计算物理磁盘位置,最后将它们封装到一起作为一个独立的索引项返回。
我建议你去看下 relativeOffset 和 physical 方法的实现,看看它们是如何计算相对位移值和物理磁盘位置信息的。
有了 parseEntry 方法,我们就能够根据给定的 n 来查找索引项了。但是,这里还有个问题需要解决,那就是,我们如何确定要找的索引项在第 n 个槽中呢?其实本质上,这是一个算法问题,也就是如何从一组已排序的数中快速定位符合条件的那个数。
二分查找算法
到目前为止,从已排序数组中寻找某个数字最快速的算法就是二分查找了,它能做到 O(lgN) 的时间复杂度。Kafka 的索引组件就应用了二分查找算法。
我先给出原版的实现算法代码。
private def indexSlotRangeFor(idx: ByteBuffer, target: Long, searchEntity: IndexSearchEntity): (Int, Int) = {
// 第 1 步:如果当前索引为空,直接返回<-1,-1>对
if(_entries == 0)
return (-1, -1)
// 第 2 步:要查找的位移值不能小于当前最小位移值
if(compareIndexEntry(parseEntry(idx, 0), target, searchEntity) > 0)
return (-1, 0)
// binary search for the entry
// 第 3 步:执行二分查找算法
var lo = 0
var hi = _entries - 1
while(lo < hi) {
val mid = ceil(hi/2.0 + lo/2.0).toInt
val found = parseEntry(idx, mid)
val compareResult = compareIndexEntry(found, target, searchEntity)
if(compareResult > 0)
hi = mid - 1
else if(compareResult < 0)
lo = mid
else
return (mid, mid)
}
(lo, if (lo == _entries - 1) -1 else lo + 1)
这段代码的核心是,第 3 步的二分查找算法。熟悉 Binary Search 的话,你对这段代码一定不会感到陌生。
讲到这里,似乎一切很完美:Kafka 索引应用二分查找算法快速定位待查找索引项位置,之后调用 parseEntry 来读取索引项。不过,这真的就是无懈可击的解决方案了吗?
改进版二分查找算法
显然不是!我前面说过了,大多数操作系统使用页缓存来实现内存映射,而目前几乎所有的操作系统都使用 LRU(Least Recently Used)或类似于 LRU 的机制来管理页缓存。
Kafka 写入索引文件的方式是在文件末尾追加写入,而几乎所有的索引查询都集中在索引的尾部。这么来看的话,LRU 机制是非常适合 Kafka 的索引访问场景的。
但,这里有个问题是,当 Kafka 在查询索引的时候,原版的二分查找算法并没有考虑到缓存的问题,因此很可能会导致一些不必要的缺页中断(Page Fault)。此时,Kafka 线程会被阻塞,等待对应的索引项从物理磁盘中读出并放入到页缓存中。
下面我举个例子来说明一下这个情况。假设 Kafka 的某个索引占用了操作系统页缓存 13 个页(Page),如果待查找的位移值位于最后一个页上,也就是 Page 12,那么标准的二分查找算法会依次读取页号 0、6、9、11 和 12,具体的推演流程如下所示:

通常来说,一个页上保存了成百上千的索引项数据。随着索引文件不断被写入,Page #12 不断地被填充新的索引项。如果此时索引查询方都来自 ISR 副本或 Lag 很小的消费者,那么这些查询大多集中在对 Page #12 的查询,因此,Page #0、6、9、11、12 一定经常性地被源码访问。也就是说,这些页一定保存在页缓存上。后面当新的索引项填满了 Page #12,页缓存就会申请一个新的 Page 来保存索引项,即 Page #13。
现在,最新索引项保存在 Page #13 中。如果要查找最新索引项,原版二分查找算法将会依次访问 Page #0、7、10、12 和 13。此时,问题来了:Page 7 和 10 已经很久没有被访问过了,它们大概率不在页缓存中,因此,一旦索引开始征用 Page #13,就会发生 Page Fault,等待那些冷页数据从磁盘中加载到页缓存。根据国外用户的测试,这种加载过程可能长达 1 秒。
显然,这是一个普遍的问题,即每当索引文件占用 Page 数发生变化时,就会强行变更二分查找的搜索路径,从而出现不在页缓存的冷数据必须要加载到页缓存的情形,而这种加载过程是非常耗时的。
基于这个问题,社区提出了改进版的二分查找策略,也就是缓存友好的搜索算法。总体的思路是,代码将所有索引项分成两个部分:热区(Warm Area)和冷区(Cold Area),然后分别在这两个区域内执行二分查找算法,如下图所示:
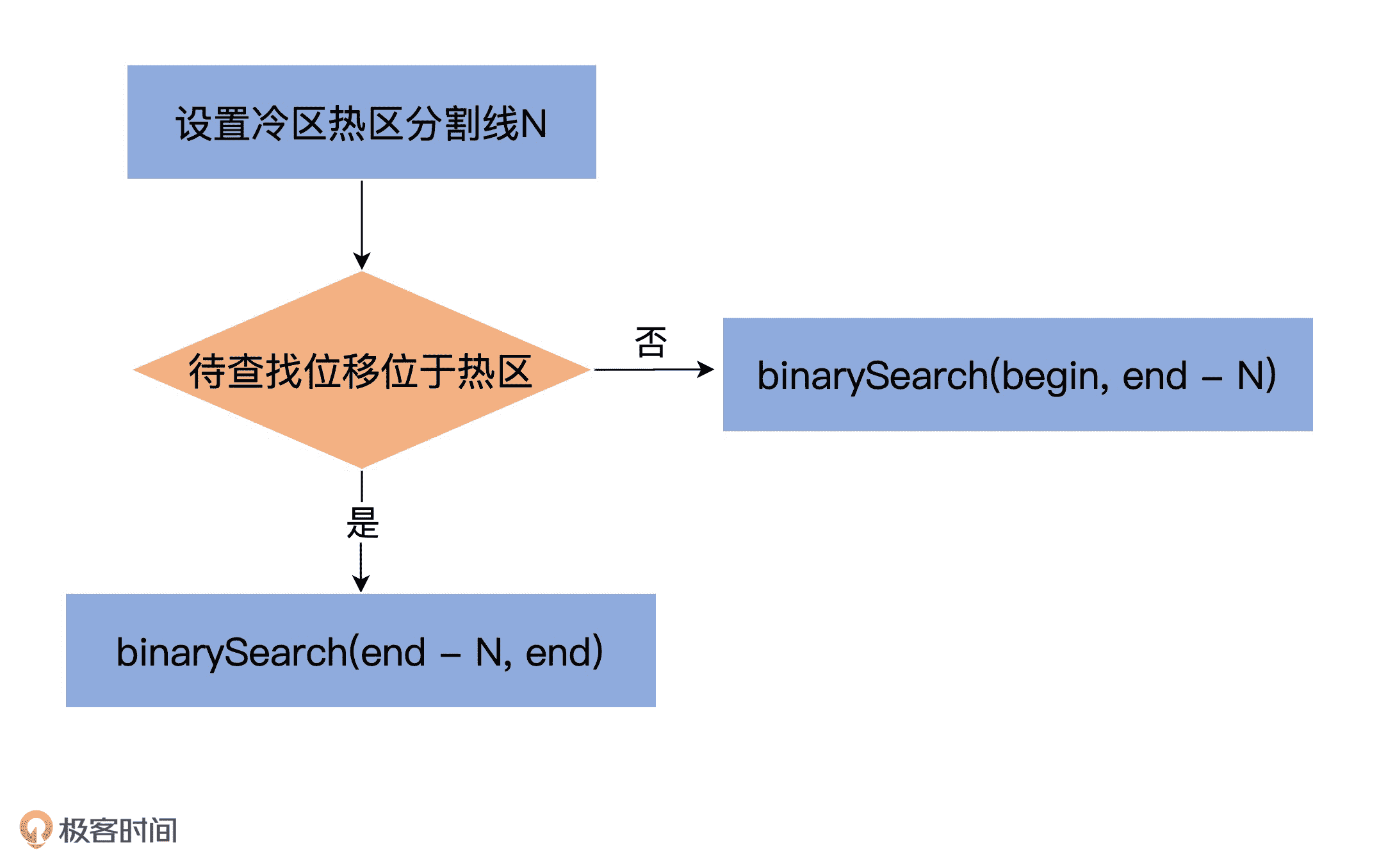
乍一看,该算法并没有什么高大上的改进,仅仅是把搜寻区域分成了冷、热两个区域,然后有条件地在不同区域执行普通的二分查找算法罢了。实际上,这个改进版算法提供了一个重要的保证:它能保证那些经常需要被访问的 Page 组合是固定的。
想想刚才的例子,同样是查询最热的那部分数据,一旦索引占用了更多的 Page,要遍历的 Page 组合就会发生变化。这是导致性能下降的主要原因。
这个改进版算法的最大好处在于,查询最热那部分数据所遍历的 Page 永远是固定的,因此大概率在页缓存中,从而避免无意义的 Page Fault。
下面我们来看实际的代码。我用注释的方式解释了改进版算法的实现逻辑。一旦你了解了冷区热区的分割原理,剩下的就不难了。
private def indexSlotRangeFor(idx: ByteBuffer, target: Long, searchEntity: IndexSearchEntity): (Int, Int) = {
// 第 1 步:如果索引为空,直接返回<-1,-1>对
if(_entries == 0)
return (-1, -1)
// 封装原版的二分查找算法
def binarySearch(begin: Int, end: Int) : (Int, Int) = {
// binary search for the entry
var lo = begin
var hi = end
while(lo < hi) {
val mid = (lo + hi + 1) >>> 1
val found = parseEntry(idx, mid)
val compareResult = compareIndexEntry(found, target, searchEntity)
if(compareResult > 0)
hi = mid - 1
else if(compareResult < 0)
lo = mid
else
return (mid, mid)
}
(lo, if (lo == _entries - 1) -1 else lo + 1)
}
// 第 3 步:确认热区首个索引项位于哪个槽。_warmEntries 就是所谓的分割线,目前固定为 8192 字节处
// 如果是 OffsetIndex,_warmEntries = 8192 / 8 = 1024,即第 1024 个槽
// 如果是 TimeIndex,_warmEntries = 8192 / 12 = 682,即第 682 个槽
val firstHotEntry = Math.max(0, _entries - 1 - _warmEntries)
// 第 4 步:判断 target 位移值在热区还是冷区
if(compareIndexEntry(parseEntry(idx, firstHotEntry), target, searchEntity) < 0) {
return binarySearch(firstHotEntry, _entries - 1) // 如果在热区,搜索热区
}
// 第 5 步:确保 target 位移值不能小于当前最小位移值
if(compareIndexEntry(parseEntry(idx, 0), target, searchEntity) > 0)
return (-1, 0)
// 第 6 步:如果在冷区,搜索冷区
binarySearch(0, firstHotEntry)
总结
今天,我带你详细学习了 Kafka 中的索引机制,以及社区如何应用二分查找算法实现快速定位索引项。有两个重点,你一定要记住。
- AbstractIndex:这是 Kafka 所有类型索引的抽象父类,里面的 mmap 变量是实现索引机制的核心,你一定要掌握它。
- 改进版二分查找算法:社区在标准原版的基础上,对二分查找算法根据实际访问场景做了定制化的改进。你需要特别关注改进版在提升缓存性能方面做了哪些努力。改进版能够有效地提升页缓存的使用率,从而在整体上降低物理 I/O,缓解系统负载瓶颈。你最好能够从索引这个维度去思考社区在这方面所做的工作。

实际上,无论是 AbstractIndex 还是它使用的二分查找算法,它们都属于 Kafka 索引共性的东西,即所有 Kafka 索引都具备这些特点或特性。那么,你是否想了解不同类型索引之间的区别呢?比如位移索引和时间戳索引有哪些异同之处。这些问题的答案我会在下节课揭晓,你千万不要错过。
课后讨论
目前,冷区和热区的分割线设定在 8192 字节处,请结合源码注释以及你自己的理解,讲一讲为什么要设置成 8192?
欢迎你在留言区畅所欲言,跟我交流讨论,也欢迎你把今天的内容分享给你的朋友。
文章作者 anonymous
上次更新 2024-05-03